optimal energy and delay tradeoffs for multi-user wireless downlinks michael j. neely university of...
TRANSCRIPT

Optimal Energy and Delay Tradeoffs forMulti-User Wireless Downlinks
Michael J. NeelyUniversity of Southern California
http://www-rcf.usc.edu/~mjneely/Infocom 2006, Barcelona, Spain
*Sponsored by NSF OCE Grant 0520324
1 2 N
Avg. Delay
Avg
. Pow
er

Assumptions: 1) Random Arrivals A(t) i.i.d. over slots. Rate vector (bits/slot)2) Random Channel states S(t) i.i.d. over slots.3) Transmission Rate Function P(t) --- Power allocation during slot t (P(t) ) S(t) --- Channel state during slot t
t0 1 2 3 …
Time slotted system (t {0, 1 , 2, …})
rate
i
power P
(P(t), S(t))
Good
Med
Bad
1 2 N

Assumptions: 1) Random Arrivals A(t) i.i.d. over slots. Rate vector (bits/slot)2) Random Channel states S(t) i.i.d. over slots.3) Transmission Rate Function P(t) --- Power allocation during slot t (P(t) ) S(t) --- Channel state during slot t
t0 1 2 3 …
Time slotted system (t {0, 1 , 2, …})
rate
i
power P
(P(t), S(t))
Good
Med
Bad
1 2 N

rate
i
power P
Good
Med
Bad
1 2 N
Control: Allocate Power (P(t) ) in Reaction to Current Channel State And Current Queue Backlogs.
Goal: Stabilize with Minimum Average Power while also Maintaining Low Average Delay.

rate
i
power P
Good
Med
Bad
1 2 N
Control: Allocate Power (P(t) ) in Reaction to Current Channel State And Current Queue Backlogs.
Goal: Stabilize with Minimum Average Power while also Maintaining Low Average Delay.
[ Avg. Power and Avg. Delay are Competing Objectives! ] What is the Fundamental Energy-Delay Tradeoff?

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
V
P
V
Av.Delay
O(1/V)
O(V)
P*
( P* = Min Av. Power for Stability )

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
V
P
V
Av.Delay
O(1/V)
O(V)
P*
( P* = Min Av. Power for Stability )

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
( P* = Min Av. Power for Stability )
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
( P* = Min Av. Power for Stability )
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
( P* = Min Av. Power for Stability )
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
( P* = Min Av. Power for Stability )
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
( P* = Min Av. Power for Stability )
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
UN(t)U1(t) U2(t)
Analysis: Use theory of Performance Optimal Lyapunov Scheduling: -Neely, Modiano 2003, 2005-Georgiadis, Neely, Tassiulas [F&T 2006, NOW Publishers]
Achieves: [O(1/V), O(V)] energy-delay tradeoff
V
P
V
Av.Delay
O(1/V)
O(V)
P*

1 2 N
Our Previous Work on Minimum Power Scheduling with Delay Tradeoffs [Neely Infocom 2005]:
V
P
V
Av.Delay
O(1/V)
O(V)
UN(t)U1(t) U2(t)
Analysis: Use theory of Performance Optimal Lyapunov Scheduling: -Neely, Modiano 2003, 2005-Georgiadis, Neely, Tassiulas [F&T 2006, NOW Publishers]
Achieves: [O(1/V), O(V)] energy-delay tradeoff
P*

V
P
V
Av.Delay
O(1/V)
( V )
P*
The Fundamental Berry-Gallager Bound for Energy-DelayTradeoffs in a Single Wireless Downlink:
A(t)
(t) = (P(t), S(t))
Av. Delay >= ( V )
[Berry, Gallager 2002]
Approach Achievability via Technique of Buffer Partitioning.

Precedents for Energy and Delay Optimizationfor Single Wireless Links:
-Berry and Gallager [2002] ( Fundamental Square Root Law )
-Uysal-Biyikoglu, Prabhakar, El Gamal [2002] -Khojastepour and Sabharwal [2004]( “Lazy Scheduling” and Filter Theory for Static Links )
-Fu, Modiano, Tsitsiklis [2003]-Goyal, Kumar, Sharma [2003]-Zafer and Modiano [2005]( Dynamic Programming, Markov Decision Theory )

Precedents for Energy and Delay Optimizationfor Single Wireless Links:
-Berry and Gallager [2002] ( Fundamental Square Root Law )
-Uysal-Biyikoglu, Prabhakar, El Gamal [2002] -Khojastepour and Sabharwal [2004]( “Lazy Scheduling” and Filter Theory for Static Links )
-Fu, Modiano, Tsitsiklis [2003]-Goyal, Kumar, Sharma [2003]-Zafer and Modiano [2005]( Dynamic Programming, Markov Decision Theory )

Challenging to extend optimal delay results for stochastic systems beyond a single queue because…
1) Parameter Explosion: (cannot practically measure) Number of channel state vectors S grows geometrically with number of links N. Markov Decision Theory and Dynamic Programming requires knowledge of:
S = Pr[ S(t) = S] (for each channel state S ).
2) State Space Explosion: (cannot practically implement) Number of Queueing State Vectors U grows geometrically.

Idea: Combine Techniques of Buffer Partitioning and Performance Optimal Lyapunov Scheduling.
1 2 N
V
P
V
Av.Delay
P*
Goals: 1) Establish the fundamental energy-delay curve for multi-user systems (extend Berry-Gallager to this case).
2) Design a dynamic algorithm to achieve optimal energy-delay tradeoffs. (Must overcome the complexity explosion problem).

Specifically: Define a general power cost metric h(P ):
1 2 N
Define average power cost:
Define: h* = Min. avg. power cost for network stability
(Push h arbitrarily close to h*, with optimal delay tradeoff…)

Theorem 1: (Characterize h*) Assume . The min average power cost h* is given as the solution to:
Define ( ) = min. avg. power cost h* above.
Corollary: For each , there is a stationary randomized alg. such that:

The Fundamental Energy-Delay Tradeoff:
1) ))mild admissibility assumptions
Theorem 2 (Multi-User Berry-Gallager Bound): If
Then if avg. cost satisfies:
We necessarily have:
1 2 N
V
h
V
Av.Delay
h*( V )
O(1/V)

Achieving Optimal Tradeoffs via Buffer Partitioning…
Recall the Berry-Gallager threshold algorithm for single queues:
(t) = (P(t), S(t))
U(t)
max
QUQmax
drift
L R
[Requires full knowledge of channel probs S]

Achieving Optimal Tradeoffs via Buffer Partitioning…
Recall the Berry-Gallager threshold algorithm for single queues:
(t) = (P(t), S(t))
U(t)
max
QUQmax
drift
L R

Achieving Optimal Tradeoffs via Buffer Partitioning…
Recall the Berry-Gallager threshold algorithm for single queues:
(t) = (P(t), S(t))
U(t)max
QUQmax
drift
L R

Let’s Consider Multi-Dimensional Buffer Partitioning:
Q
U1
U2Case N=2
1 2 N
Q

Let’s Consider Multi-Dimensional Buffer Partitioning:
Q
U1
U2Case N=2
Q

Let’s Consider Multi-Dimensional Buffer Partitioning:
Q
U1
U2Case N=2
(not implementable)
Q

Analysis of the Threshold Algorithm:(exchanging sums over the 2N regions yields…)
iL(t) = Pr[Ui(t) <Q]
iR(t) = 1 - i
L(t)

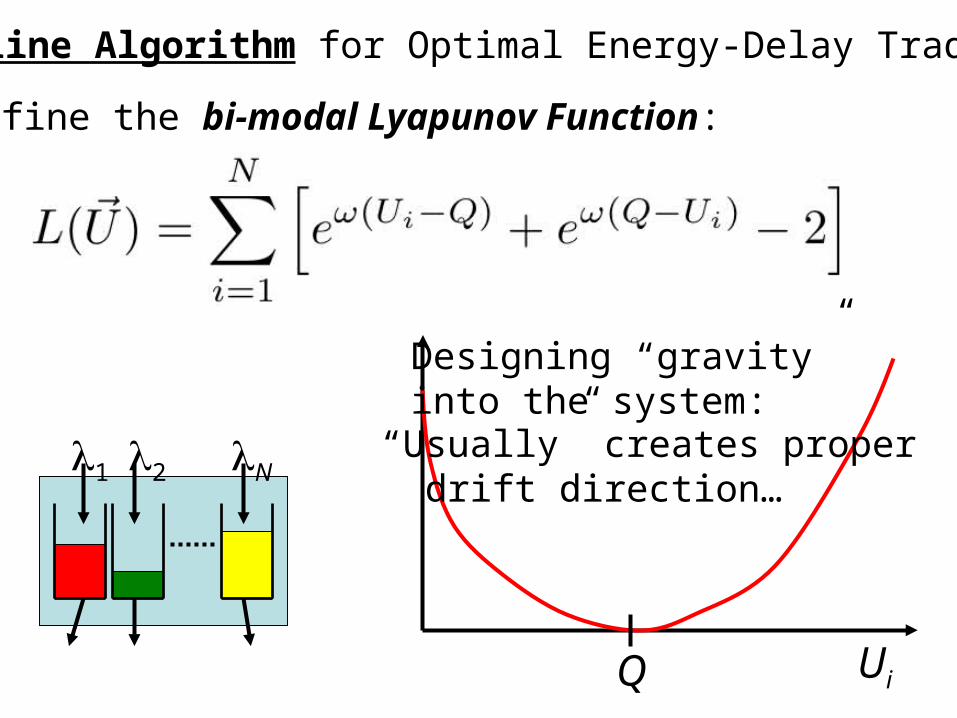
An Online Algorithm for Optimal Energy-Delay Tradeoffs:
1 2 N
Define the bi-modal Lyapunov Function:
UiQ
Designing “gravity”into the system:
An Online Algorithm for Optimal Energy-Delay Tradeoffs:
1 2 N
Define the bi-modal Lyapunov Function:
UiQ
Designing “gravity”into the system:“Usually” creates proper drift direction…

1 2 N*Key inequality that holds with equality for the stationary threshold algorithm.
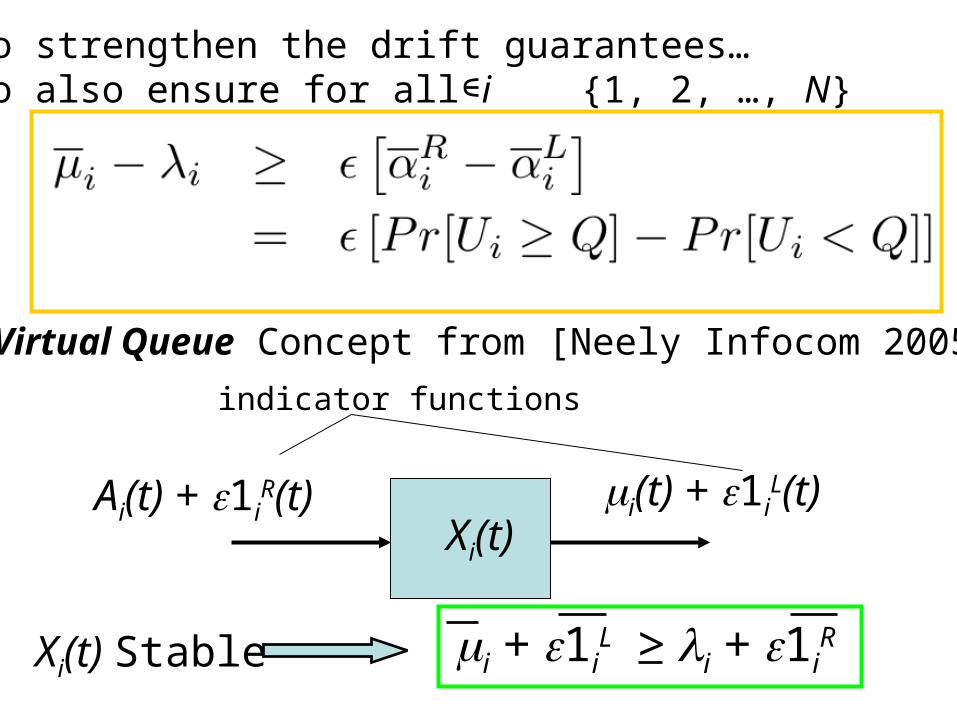
Need to strengthen the drift guarantees…Want to also ensure for all i {1, 2, …, N}

Need to strengthen the drift guarantees…Want to also ensure for all i {1, 2, …, N}
Use Virtual Queue Concept from [Neely Infocom 2005]:
Xi(t)Ai(t) + 1i
R(t) i(t) + 1iL(t)
indicator functions
Xi(t+1) = max[Xi(t) - i(t) - 1iL(t), 0] + Ai(t) + 1i
R(t)
Need to strengthen the drift guarantees…Want to also ensure for all i {1, 2, …, N}
Use Virtual Queue Concept from [Neely Infocom 2005]:
Xi(t)Ai(t) + 1i
R(t) i(t) + 1iL(t)
indicator functions
Xi(t) Stable i + 1iL > i + 1i
R

To Stabilize Virtual Queues Xi(t) and Actual Queues Ui(t):

The Tradeoff Optimal Control Algorithm (TOCA):
1) Every slot t, observe channel state S(t) and queue backlogs U(t), X(t). Allocate power P(t) = P, where P solves:
2) Transmit with rate i(t) = i(P(t), S(t)). 3) Update the Virtual Queues Xi(t).

Theorem 3 (TOCA Performance): For suitable , Q:
1 2 N
V
h Av.Delay
()
V
O(1/V)( V )

Beyond the Berry-Gallager Bound: Logarithmic delay!
If the Minimum Energy function () is peicewise linear(not strictly concave), then under suitable, Q, TOCA yields:
() (shown in 1 dimension)

Further, logarithmic delay in this scenario is optimal! Simple One Queue Example: P(t) ={0, 1} Watt. Two Equally Likely Channel States (GOOD, BAD):
U(t) (t)=(P(t),S(t))
() Can show thatlogarithmic delay is necessaryand achievable!
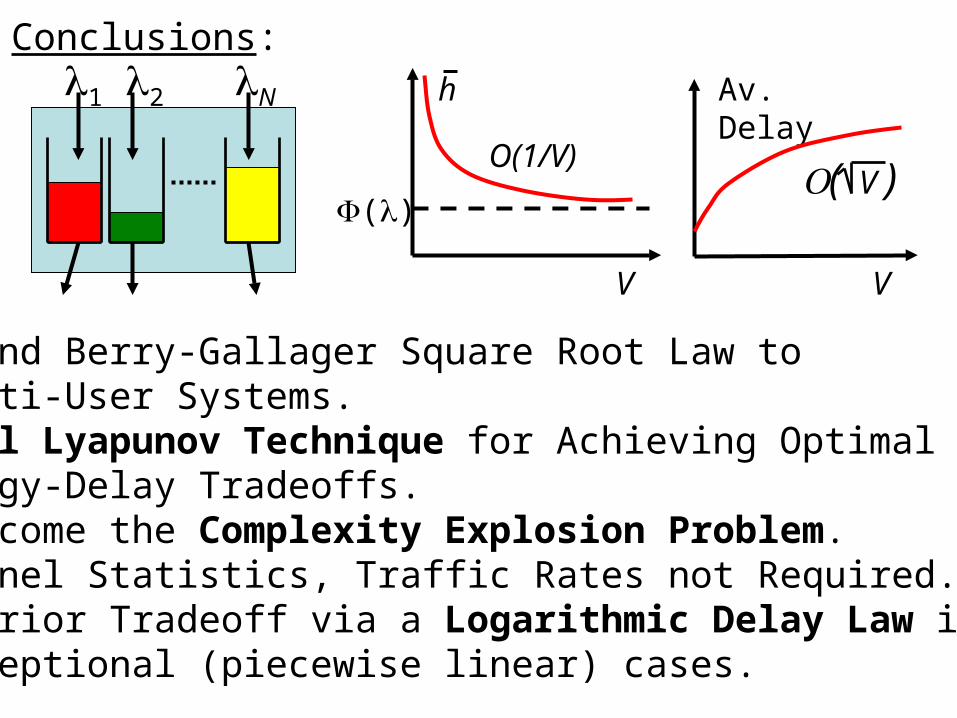
Conclusions:1 2 N
V
h Av.Delay
()
V
O(1/V)( V )
-Extend Berry-Gallager Square Root Law to Multi-User Systems.-Novel Lyapunov Technique for Achieving Optimal Energy-Delay Tradeoffs.-Overcome the Complexity Explosion Problem.-Channel Statistics, Traffic Rates not Required.-Superior Tradeoff via a Logarithmic Delay Law in exceptional (piecewise linear) cases.