universidade tecnologica federal do...
TRANSCRIPT

UNIVERSIDADE TECNOLOGICA FEDERAL DO PARANA
DEPARTAMENTO ACADEMICO DE ELETRONICA
CURSO DE ENGENHARIA DE COMPUTACAO
ANTONIO LAZARO DE REZENDE NETOARI MAGAGNIN JUNIOR
EDUARDO CABRAL RESENDE NEIVARICARDO FARINHAKI
SISTEMA DE MEDICAO DE CAMPO MAGNETICO
BASEADO NO EFEITO HALL E ARDUINO
MONOGRAFIA
CURITIBA
2010

ANTONIO LAZARO DE REZENDE NETOARI MAGAGNIN JUNIOR
EDUARDO CABRAL RESENDE NEIVARICARDO FARINHAKI
SISTEMA DE MEDICAO DE CAMPO MAGNETICO
BASEADO NO EFEITO HALL E ARDUINO
Monografia apresentado a disciplina de Oficina deIntegracao II do Curso de Engenharia de Com-putacao da Universidade Tecnologica Federal doParana como requisito parcial para aprovacao.
Orientador: Nestor Cortez Saavedra Filho, Dr
Co-orientador: Arandi Ginane Bezerra Jr, Dr
CURITIBA
2010

RESUMO
REZENDE NETO, Antonio L.; MAGAGNIN JUNIOR, Ari; NEIVA, Eduardo C. Re-sende; FARINHAKI, Ricardo. Sistema de Medicao de Campo Magnetico Baseado noEfeito Hall e Arduino. 46 f. Monografia – Curso de Engenharia de Computacao, Univer-sidade Tecnologica Federal do Parana. Curitiba, 2010.
O presente trabalho consiste no desenvolvimento de um sistema capaz de medir valores deintensidade de campo magnetico atraves de um sistema de hardware e software. O sensorde Efeito Hall capaz de medir a intensidade do campo e movimentado por um motor em umtrilho com precisao milimetrica. Na parte de hardware e usada a plataforma Arduino, quefara a interface entre o sensor e o computador, alem de controlar o motor. O fato do sensorser movimentado em um trilho com precisao milimetrica garante melhores resultados doque se o usuario tivesse que movimenta-lo manualmente. Um software desenvolvido emJAVA e utilizado para plotar o grafico que relaciona a distancia do sensor a fonte decampo magnetico com a intensidade desse campo. O software tem o objetivo de facilitarao usuario a visualizacao dos conceitos fısicos relacionados ao a campos magneticos e suadistribuicao espacial de intesidade.
Palavras-chave: Arduino, Efeito Hall, Sensor

ABSTRACT
REZENDE NETO, Antonio L.; MAGAGNIN JUNIOR, Ari; NEIVA, Eduardo C. Re-sende; FARINHAKI, Ricardo. Magnetic Field Measurement System Based on Hall’s Ef-fect and Arduino. 46 f. Monografia – Curso de Engenharia de Computacao, UniversidadeTecnologica Federal do Parana. Curitiba, 2010.
The present work consists on the development of a system able to measure the magneticfield intensity values through hardware and software. The Hall Effect sensor that measuresthe field intensity is moved by an step motor which is controlled by a specific integratedcircuit. It is used as well, an Arduino connected to a computer that allows the visualizationof the sensor response and the position of the motor. Therefore, a graphic of the magneticintensity vs. distance is ploted and can be viewed on the computer through a softwareimplemented in JAVA. Between the sensor and the analog input of the Arduino occursthe amplification of the sensor’s signal in order to increase the sensibility of the sensor inrelation to the magnetic field variation and obtain values with the best accuracy possible.The fact of the motor moving the sensor in a rail with milimetric precision provides betterresults than if the user had to do it manually.
Keywords: Arduino, Hall Effect, Sensor

INTEGRANTES DA BANCA
Alvaro Luiz Sordi Filho (Aluno)
Hugo Vieira Neto, Dr (Professor)
Pedro Zambianchi Junior, Dr (Professor)
iii

LISTA DE FIGURAS
–FIGURA 1 APLICACAO DE UM CAMPO ELETRICO EM UMA BARRA DE
METAL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13–FIGURA 2 DEPENDENCIA DA RESISTENCIA DE HALL (K ) COM O CAMPO
MAGNETICO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15–FIGURA 3 REPRESENTACAO DE UM AMPLIFICADOR OPERACIONAL. 16–FIGURA 4 CIRCUITO REPRESENTADO UM OPAMP ATUANDO COMO
AMPLIFICADOR NAO INVERSOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17–FIGURA 5 CIRCUITO REPRESENTADO UM OPAMP ATUANDO COMO
UM AMPLIFICADOR INVERSOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17–FIGURA 6 CIRCUITO REPRESENTADO UM OPAMP ATUANDO COMO
UM AMPLIFICADOR DIFERENCIADOR . . . . . . . . . . . . . . . . . . . . . . . . 17–FIGURA 7 CIRCUITO REPRESENTADO UM OPAMP ATUANDO COMO
UM AMPLIFICADOR INTEGRADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18–FIGURA 8 CIRCUITO REPRESENTADO UM OPAMP ATUANDO COMO
UM AMPLIFICADOR POR SUBTRACAO PONDERADA AOS RE-
SISTORES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18–FIGURA 9 SENSOR DE EFEITO HALL NOS FORMATOS SMD E CONVEN-
CIONAL. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20–FIGURA 10 ARDUINO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21–FIGURA 11 MOTOR DE PASSO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23–FIGURA 12 SIMPLIFICACAO DO FUNCIONAMENTO DO MOTOR DE PASSO. 24–FIGURA 13 TELA INICIAL DO PROGRAMA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27–FIGURA 14 EXEMPLO DO MODELO DE GRAFICO . . . . . . . . . . . . . . . . . . . . . . 27–FIGURA 15 GRAFICO VO POR VI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28–FIGURA 16 CONFIGURACAO DO LM317. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30–FIGURA 17 CONFIGURACAO DO LM7805. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30–FIGURA 18 ESQUEMATICO ULN2003. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31–FIGURA 19 ESQUEMATICO COMPLETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32–FIGURA 20 GRAFICO QUE DEMONSTRA OS DADOS OBTIDOS NO PRO-
CESSO DE CALIBRAGEM DO MOTOR DE PASSO . . . . . . . . . . . . . 34–FIGURA 21 GRAFICO QUE MOSTRA A VARIACAO DE TENSAO DE SAIDA
COM RELACAO A TENSAO DE ENTRADA NO AMPLIFICADOR.
36–FIGURA 22 GRAFICO QUE DEMONSTRA A SENSIBILIDADE DO SENSOR
COM A VARIACAO DA TENSAO DE ALIMENTACAO . . . . . . . . . 36–FIGURA 23 GRAFICO DA CURVA DE ENTRADA DO SENSOR RELACIONADA

A SAIDA EM GAUSS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39–FIGURA 24 SOLENOIDE UTILIZADO PARA OS CALCULOS . . . . . . . . . . . . . 40–FIGURA 25 GRAFICO DE REGRESSAO CAMPO MAGNETICO X VALOR
ARDUINO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40–FIGURA 26 GRAFICO DE REGRESSAO CORRENTE X VALOR ARDUINO 41

SUMARIO
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1 MOTIVACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2 OBJETIVOS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.1 Objetivo Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Objetivos Especıficos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.3 METODOLOGIA. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92 REFERENCIAL TEORICO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1 FISICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.1 Lecionamento de Fısica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.1.2 Campo Magnetico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.3 Efeito Hall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.4 Efeito Hall Quantico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143 CONSTRUCAO DO EQUIPAMENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1 HARDWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1.1 Amplificador Operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 163.1.2 Regulador de Tensao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2 SENSOR DE EFEITO HALL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 193.2.1 Sensores . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2.2 Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3 MOTOR DE PASSO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 234 SOFTWARE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.1 ARDUINO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .254.1.1 Sketch do Arduino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.2 JAVA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.2.1 Programa em Java . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 265 CONSTRUCAO. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .285.1 CONSTRUCAO DO AMPLIFICADOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 285.2 CONSTRUCAO DOS REGULADORES DE TENSAO . . . . . . . . . . . . . . . . . . . . . . . . . . 295.3 CONTROLADOR ULN2003 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 315.4 CIRCUITO COMPLETO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 316 CALIBRACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336.1 MOTOR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336.1.1 Utilizando o motor de passo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .336.1.2 Calibracao do motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 336.2 SENSOR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .356.2.1 Calibracao do Sensor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356.2.2 Por meio de dados teoricos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356.2.3 Por meio de regressao linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .387 CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427.1 RESULTADOS OBTIDOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427.1.1 Projetos futuros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43

8 REFERENCIAS BIBLIOGRAFICAS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
8
1 INTRODUCAO
1.1 MOTIVACAO
A principal motivacao para a realizacao deste trabalho foi a ideia de auxiliar em aulas
laboratoriais de fısica, relacionados a medicao espacial do campo magnetico, na imple-
mentacao de um dispositivo eletronico integrado com software que pudesse ser viavel
financeiramente, acompanhado pela simplicidade de uso pela parte do usuario. Outros
grandes fatores que foram motivadores estao relacionados a aquisicao de conhecimen-
tos pela equipe ,pois no desenvolvimento do sistema, conhecimentos anteriores acerca de
hardware e software foram aproveitados e concatenados a novos adquiridos com a essa
experiencia de projeto.
1.2 OBJETIVOS
1.2.1 Objetivo Geral
Desenvolver um sistema de hardware e software para a medicao de campos magneticos
que possa ser usado no auxılio do ensino de eletro-magnetismo.
1.2.2 Objetivos Especıficos
• Desenvolver um dispositivo baseado em Arduino que obtem os valores de campo
magnetico a partir de um sensor de efeito Hall.
• Utilizar um motor de passo para mover o sensor em um trilho com precisao mil-
imetrica, para automatizar o processo de aquisicao de dados.
• Desenvolver um software que faca a comunicacao com o Arduino para plotar o
grafico que relacione a intensidade do campo magnetico com a distancia percorrida
pelo sensor movimentado no trilho.
9
1.3 METODOLOGIA
A princıpio, a elaboracao do trabalho foi dividida em tres etapas:
Primeira etapa:
Foi utilizada a estrutura mecanica de um scanner, juntamente com o motor de passo
que este utiliza para movimentar o seu sensor de imagem, para maior precisao no controle
de distancia e movimentar o sensor Hall. Para calcular o campo magnetico sao utilizados
dois sensores Hall: um para mensurar o campo magnetico da local terra com mınimas
interferencias do campo a ser medido, e outro para capturar os dados do campo mag-
netico em questao juntamente com o campo magnetico da Terra, sendo que o primeiro
ficaria longe do segundo para evitar intereferencias. E entao utilizado um amplificador
operacional atuando como diferenciador obtendo-se apenas o campo magnetico na posicao
desejada. Todas essas medidas sao feitas a partir de tensoes geradas pelos sensores, que
sao proporcionais ao campo magnetico.
Segunda etapa:
A segunda parte foi realizada apos montar a base para efetuar as primeiras medidas
de campo, e utiliza-la para medir campos magneticos em bobinas e fios, que possam ter
seu campo magnetico previamente calculado e, com isso, efetuar uma calibracao mais
precisa do equipamento. Foi desenvolvida uma plataforma para computador em JAVA,
que estabeleca uma conexao com o Arduino e receba esse valor do sensor Hall e a posicao do
motor de passo, permitindo que seja gerado um grafico de campo magnetico por distancia
aumentando a interatividade do usuario com o sistema. Devido ao campo magnetico local
da terra ser de uma ordem de grandeza muito baixa, foi desnecessario a utilizacao de um
sensor somente para isso.
Terceira etapa:
Ja na etapa final, o foco do trabalho foi na elaboracao da monografia. Foram uti-
lizadas anotacoes obtidas a partir do desenvolvimento do projeto para exprimir de fato as
dificuldades encontradas e como estas foram resolvidas. O foco foi tambem na calibracao
final do sistema, realizando ajustes finos do programa do computador e do sistema de
hardware.

10
2 REFERENCIAL TEORICO
2.1 FISICA
2.1.1 Lecionamento de Fısica
Quando um professor prepara uma aula, considera que os alunos saibam um pouco
sobre o conteudo ou conheca informacoes distorcidas da mesma. Consequentemente, sua
meta torna-se preencher as lacunas dos alunos, em primeiro lugar com as leis e formulas
fundamentais e depois com exercıcios e problemas nos quais essas mesmas leis serao uti-
lizadas. E para permanecer algo mais facilmente na consciencia do aluno, essas formulas
sao demonstradas, repetidas, esmiucadas e aplicadas em casos triviais onde algumas vezes
se apresentam maiores discussoes. Os alunos, normalmente os mais dedicados tomam
nota, pedem esclarecimentos, tentam imitar o professor em alguns exercıcios, ate que fi-
nalmente aprendem o jogo de ideias daquele conteudo. Pode ser que o professor ate mostre
algum experimento para confirmar a teoria, mas o exame se constituira invariavelmente
de um exercıcio bem parecido com aqueles resolvidos em classe ou no livro. A maioria dos
alunos e aprovada, mesmo que com dificuldade, e todos ficam satisfeitos. Mas a partir
deste fato abre-se um questionamento.
Sera que nao e necessario utilizar-se mais a pratica para resolver alguns exercıcios ou
questoes uma vez que e com elas que os alunos irao se deparar durante a decorrer de sua
profissao, ou mesmo no dia a dia?
Pode-se confirmar o tal discussao ao menos uma citacao da literatura.
Conforme pressupostos epistemologicos construtivistas, os processos de
aprendizagem ocorrem na interacao do sujeito com o meio social e material, a
partir da confrontacao de ideias e de acoes. Considera-se que as informacoes
nao estao acabadas e que o conhecimento nao vem pronto, mas e construıdo
atraves da troca de experiencias, das interacoes e do dialogo entre os sujeitos.
[RODRIGUES; COELHO; SCARAMUZA, 2009]

11
Sendo assim e possıvel concluir que a interacao tambem ocorre quando o sujeito par-
ticipa ativamente de uma aula de laboratorio ou o mesmo se habilite a fazer experiencias a
fim de buscar o conhecimento, e para produzir essas experiencias naturalmente ira precisar
de instrumentos de medicoes, ou seja, de tecnologia.
Nao e difıcil de se analisar tal situacao. Vale lembrar que ha inumeros esforcos do
governo brasileiro para levar tecnologia para dentro das instituicoes, uma vez que o mer-
cado de trabalho esta exigindo cada vez mais o conhecimento tecnologico. O projeto
ACADEMICS da SISNEMA Informatica e um exemplo disso.
2.1.2 Campo Magnetico
Os conceitos primordiais de campo magnetico ja sao conhecidos ha tempos. Na Grecia
Antiga, ja se conheciam as propriedades da magnetita (Fe3O4), que e um ıma permanente
que atrai pequenos objetos de ferro [NUSSENZVEIG, 1997]. E notorio ressaltar que nao se
pode comparar analogamente N (norte) e S (sul) de um ima com cargas eletricas positivas
e negativas.
A existencia de um campo magnetico ~B em algum ponto especıfico do espaco pode
ser detectada por meio de uma bussola. Tem sido observado experimentalmente que,
quando uma partıcula de carga eletrica q e velocidade ~v esta em uma regiao com um
campo magnetico ~B, uma forca e exercida na partıcula que e proporcional a q. Essa e
perpendicular a velocidade e ao campo magnetico. Estes resultados experimentais podem
ser resumidos como: quando uma partıcula de carga q e velocidade ~v esta em uma regiao
do espaco com um campo magnetico ~B, forca magnetica ~F , sendo × o sinal que representa
a operacao de produto vetorial, na partıcula e [TIPLER, 2009]
~F = q ~v × ~B (1)
O objetivo do sistema e tornar a medicao desse campo magnetico possıvel a partir de
um sistema automatizado.
2.1.3 Efeito Hall
O efeito Hall e a producao de diferenca de potencial atraves de um condutor eletrico.
Essa tensao e transversa a corrente no condutor e e perpendicular ao campo magnetico.
Dentro de um mesmo material, por exemplo um fio metalico que esteja conduzindo cor-
rente e sendo afetado por um campo magnetico, surgiria uma diferenca de tensao entre

12
dois locais, pertencente a um plano perpendicular a corrente e ao campo magnetico inci-
dente ao fio, dessa mesma barra. O Efeito Hall foi descoberto por Edwin H. Hall no final
do seculo XIX.
13
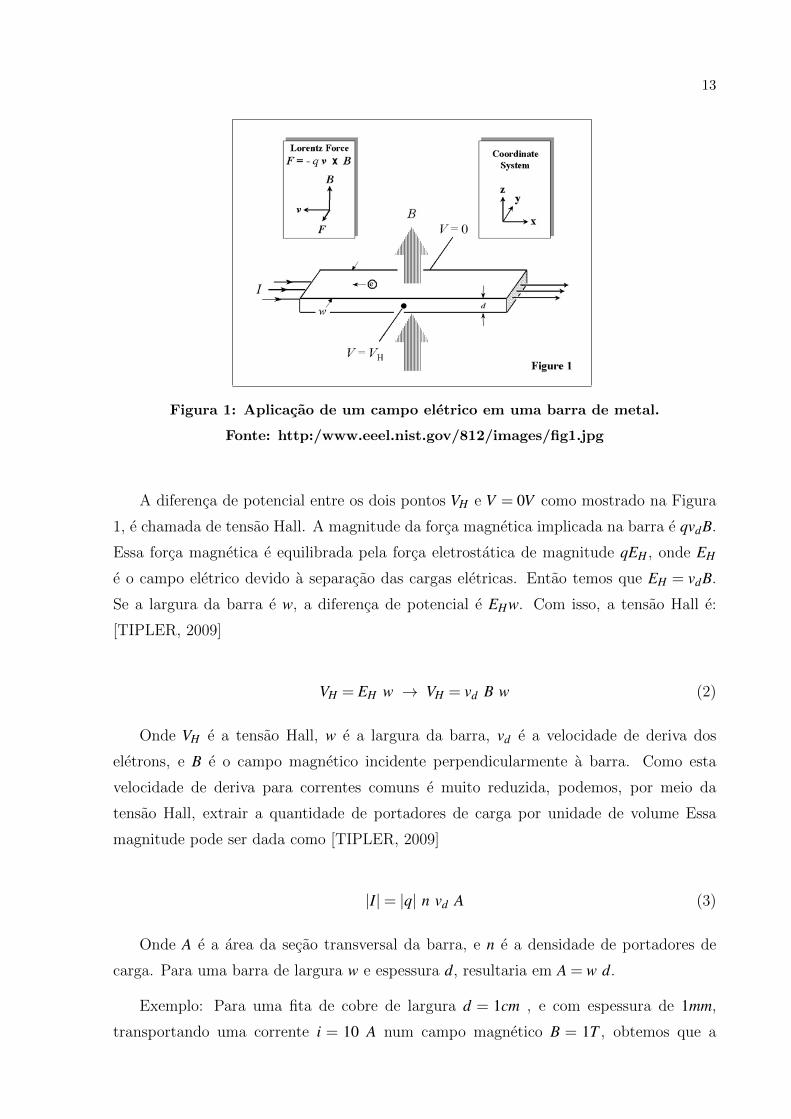
Figura 1: Aplicacao de um campo eletrico em uma barra de metal.
Fonte: http:/www.eeel.nist.gov/812/images/fig1.jpg
A diferenca de potencial entre os dois pontos VH e V = 0V como mostrado na Figura
1, e chamada de tensao Hall. A magnitude da forca magnetica implicada na barra e qvdB.
Essa forca magnetica e equilibrada pela forca eletrostatica de magnitude qEH , onde EH
e o campo eletrico devido a separacao das cargas eletricas. Entao temos que EH = vdB.
Se a largura da barra e w, a diferenca de potencial e EHw. Com isso, a tensao Hall e:
[TIPLER, 2009]
VH = EH w → VH = vd B w (2)
Onde VH e a tensao Hall, w e a largura da barra, vd e a velocidade de deriva dos
eletrons, e B e o campo magnetico incidente perpendicularmente a barra. Como esta
velocidade de deriva para correntes comuns e muito reduzida, podemos, por meio da
tensao Hall, extrair a quantidade de portadores de carga por unidade de volume Essa
magnitude pode ser dada como [TIPLER, 2009]
|I|= |q| n vd A (3)
Onde A e a area da secao transversal da barra, e n e a densidade de portadores de
carga. Para uma barra de largura w e espessura d, resultaria em A = w d.
Exemplo: Para uma fita de cobre de largura d = 1cm , e com espessura de 1mm,
transportando uma corrente i = 10 A num campo magnetico B = 1T , obtemos que a

14
tensao de Hall gerada e de aproximadamente 7,4 µV . [NUSSENZVEIG, 1997]
Como a maioria dos portadores de cargas sao eletrons, a quantidade |q|, e a carga
de um eletron, e. Entao a densidade de numero de portadores de carga n e dada por
[TIPLER, 2009]
n =|I|
A |q| vd→ n =
|I|w d e vd
(4)
Substituindo as equacoes 2 e 4, temos que:
n =|I| B
d e VH(5)
Onde I e a corrente, B e o campo magnetico, d e a largura da fita, e e a carga do
eletron, e VH e a tensao Hall.
Com isso, a tensao Hall nos fornece um metodo conveniente para a medida de campos
magneticos. Se rearranjarmos a equacao anterior podemos escrever a tensao de Hall como:
VH =|I|
n d eB, (6)
onde VH e a tensao Hall, I a corrente que passa na barra, n a densidade de portadores
de carga, d a altura, e a carga elementar do eletron, e B o campo magnetico.
2.1.4 Efeito Hall Quantico
De acordo com a equacao 6, a tensao Hall deveria aumentar linearmente com a inten-
sidade do campo magnetico B para uma dada corrente em uma dada lamina. Em 1980,
quando estudava-se o efeito Hall em semicondutores em condicoes nao comuns, como tem-
peraturas e sob campos magneticos muito intensos, Kalus von Klitzing descobriu que um
grafico de VH versus B resultava em uma serie de platos como pode ser visto na Figura
2, isto e, a tensao de Hall e quantizada. Pela descoberta do efeito Hall quantico, foi
concedido a von Klitzing o Premio Nobel de Fısica em 1985 [TIPLER, 2009].

15
Figura 2: Dependencia da resistencia de Hall (k ) com o campo magnetico.
Fonte: http://www.warwick.ac.uk/ phsbm/qhe.htm
Na teoria do efeito Hall quantico, a resistencia Hall, definida como RH = VHI , pode
assumir apenas os valores: [TIPLER, 2009]
RH =VH
I=
RK
n,n = 1,2,3, ...
onde n e um inteiro, e RK , denominada constante de von Klitzing, esta relacionada a
carga eletrica fundamental e e a constante de Planck h, pelo seu valor exato:
RK−90 =he2 = 25812,8076
Posteriormente, os professores americanos Laughlin, Stormer e Tsui, por perceberem
que sob certas condicoes especiais a resistencia de Hall e dada pela equacao anterior e
que existem inteiros n que quando substituıdos por uma serie de equacoes fracionarias
resultaria em algo semelhante a Figura 2. Pela descoberta do entao denominado efeito
hall quantico fracionario, os professores receberam o Nobel de Fısica em 1998. A partir
de entao desenvolveu-se os conceitos necessarios para que se houvesse o surgimento do
sensor de Efeito Hall.

16
3 CONSTRUCAO DO EQUIPAMENTO
3.1 HARDWARE
3.1.1 Amplificador Operacional
Componentes muito comuns hoje, os amplificadores operacionais atuam como dispos-
itivos bastantes versateis sendo aplicados para varias finalidades. Trata-se de um bloco
fundamental para a realizacao de circuitos analogicos. Sua composicao interna e feita a
partir de transistores, e sua representacao conhecida e representada na figura abaixo.
Figura 3: Representacao de um amplificador operacional.
Fonte: http://www.lsi.usp.br/ roseli/www/psi2307 2004-Teoria-7-AmpOp.pdf
Devido a suas caracterısticas internas, e possıvel implementar configuracoes matemati-
cas a partir de configuracoes padroes para a criacao de varios tipos de circuitos. Essas
configuracoes matematicas sao capazes de fornecer rapidamente descricoes de um circuito
que possa fazer desde simples amplificadores ate filtros complexos, diferenciadores, inte-
gradores, etc.
• Amplificador Nao-inversor
Vo =
(1 +
R2R1
)vi (9)
• Amplificador Inversor
Vo =−R2R1
vi (10)
• Diferenciador

17
Figura 4: Circuito representado um OpAmp atuando como amplificador nao inver-sor
Figura 5: Circuito representado um OpAmp atuando como um amplificador inversor
Figura 6: Circuito representado um OpAmp atuando como um amplificador difer-enciador
Vo (t) =−R Cdvi
dt(11)
Em uma frequencia especıfica o ganho e de:
vo =−2 π f R C vi (12)
• Integrador
Vo (t) =− 1RC
∫ t
0vi (t) dt (13)
Em uma frequencia especıfica o ganho e de:

18
Figura 7: Circuito representado um OpAmp atuando como um amplificador inte-grador
vo =− vi
2 π f R C(14)
• Subtrator
Figura 8: Circuito representado um OpAmp atuando como um amplificador porsubtracao ponderada aos resistores
vo =1 + R2
R1
1 + R3R4
v2−R2R1
v1 (15)
Primeiramente optou-se por ser utilizado no sistema dois amplificadores, um subtrator
com resistores iguais e outro nao-inversor, mais tarde, esse circuito foi trocado apenas por
um subtrator com resistores ponderados.

19
3.1.2 Regulador de Tensao
Um regulador de tensao e responsavel por manter uma tensao constante em sua saıda.
Sua composicao pode ser feita tanto de partes mecanicas e eletronicas ou puramente com
componentes eletronicos. Pode possuir caracterıstica de operar ou em corrente contınua
ou alternada.
Possui uma grande utilidade quando e necessario manter uma tensao dentro de um
circuito constante que nao dependa da tensao de entrada. Por esse fato, pode ocorrer
uma dissipacao de energia muito grande sobre o componentem, levando passivamente a
atingir temperaturas altas e o tornar inutilizavel. Por isso dependendo de sua utilizacao
e necessario em conjunto a utilizacao de dissipadores de calor.
Sua principal aplicacao no projeto foi para o desenvolvimento do amplificador opera-
cional apenas com uma tensao positiva e seu papel era fornecer a tensao baixa constante
para entrar como V2 no amplificador subtrator, sendo V1 a tensao de saıda do sensor, outra
utilizacao para ele foi para a alimentacao do sensor a uma tensao constante.
3.2 SENSOR DE EFEITO HALL
O sensor de Efeito Hall quando submetido a uma tensao de entrada sobre um campo
magnetico perpendicular a direcao da corrente gera a tensao Hall em seu terminais em
uma terceira direcao no espaco sendo perpendicular as duas anteriores - corrente e campo.
A tensao Hall e proporcional ao produto da corrente da tensao de entrada com o valor do
campo magnetico incidente perpendicularmente. Um sensor ideal teria [MOSSER, 1995]:
VH = Ki B I = Kv B Va (16)
Onde Ki = 1e ns
, em que e e a carga do eletron, e ns seria a densidade de portadores de
carga por unidade de area, e Kv = W L µr, em que W e L sao o comprimento e a largura
respectivamente, do sensor e µ e a mobilidade dos portadores de eletrons. Em um sensor
real, existem irregularidades como nao homogeneidade ou o desalinhamento dos eletrodos
durante o processo de fabricacao, entao a tensao Hall VH e escrita como [MOSSER, 1995]:
VH = Ki I B (1 +f
µ B) (17)
Em que o parametro f , considerado pequeno quando comparado ao valor 1, e utilizado

20
para considerar o sensor como uma situacao nao ideal. Para conseguir boa sensibilidade,
diga-se uma boa saıda de tensao para pequenas variacoes de campo magnetico, e necessario
uma densidade menor de portadores de carga por unidade de area [MOSSER, 1995].
Essa tensao Hall de saıda e entao amplificada por um amplificador operacional, sendo
que a variacao de sensibilidade de um sensor Hall e devido a configuracao do amplificador,
e colocada na saıda do dispositivo.
3.2.1 Sensores
O componentes eletronicos fabricados pela Allegro A1301 e A1302 sao sensores de
Efeito Hall lineares de tempo contınuo com sua tensao de saida dependente da tensao
de entrada. Eles foram projetados para prover precisamente uma tensao de saıda pro-
porcionalmente ao campo magnetico aplicado. O ponto de tensao quiescente esta como
padrao a 50% da entrada, e para os dois modelos a diferenca significativa e a sensibilidade:
enquanto o A1301 opera a 2.5 mv/G, o A1302 opera a 1.3 mv/G.
Figura 9: Sensor de Efeito Hall nos formatos SMD e convencional.
Fonte: Allegro datasheet A1301/A1302 2005-2006
Dentro do sensor existe um circuito integrado que inclui um componente que possui
sensibilidade ao Efeito Hall, um amplificador linear e um transistor CMOS. A utilidade do
amplificador e que como o valor de tensao Hall tende a ser baixo, o amplificador ajuda a
mensuracao do sinal. O componente escolhido para que se realizasse os testes foi o A1302
devido a sua satisfatoria sensibilidade e a disponibilidade.

21
3.2.2 Arduino
O Arduino1 e uma plataforma open-source de desenvolvimento criada com o objetivo
de ser facil de programar e usar. E destinada a pessoas que desejam criar objetos ou
ambientes interativos, como artistas, designers e estudantes.
O Arduino pode receber informacoes de uma variedade de sensores e pode interagir
com o ambiente, controlando luzes, motores, e outros atuadores. O microcontrolador
do Arduino e programado usando-se a linguagem de programacao Arduino, baseada em
Wiring2, e o ambiente de desenvolvimento Arduino, baseado em Processing3. Os proje-
tos que utilizam o Arduino podem trabalhar sozinhos ou podem se comunicar com um
computador.
Figura 10: Arduino.
Fonte: www.arduino.cc
A escolha do Arduino se deve ao fato de que e uma plataforma relativamente barata
e bastante flexıvel. Alem disso, como sua programacao e simples de ser feita, o Arduino
usado nesse projeto pode ser usado para outros projetos de auxılio ao ensino de fısica
bastando, para isso, apenas sua reprogramacao e a troca de sua shield. Shields sao placas
que podem ser ligadas em cima do PCB (Placa de Circuito Impresso, do ingles ”Printed
Circuit Board”) com a finalidade de se expandir a capacidade do Arduino. Outro ponto in-
teressante do Arduino e que e possıvel que sejam feitas shields, que sao circuitos com pinos
que se encaixam perfeitamente sobre os conectores de entrada do Arduino, possibilitando
1Maiores informacoes disponıveis em: www.arduino.cc2Maiores informacoes disponıveis em: http://wiring.org.co/3Maiores informacoes disponıveis em: http://processing.org/

22
assim, a mudanca da funcao do Arduino apenas com a troca da shield.
O modelo escolhido para o projeto e o Arduino Diecimila utilizando-se de um con-
trolador ATMega328. Essa escolha foi feita devido a este modelo ja ser compatıvel com
a porta USB, presente atualmente na grande maioria dos computadores pessoais. Essa
escolha nao limita o projeto apenas no modelo Diecimila, pois varios outros modelos sao
compatıveis. Dessa forma o programa usado no Arduino desse projeto pode ser carregado
em outro modelo de Arduino tambem.

23
3.3 MOTOR DE PASSO
Pode-se definir o motor de passo como um atuador eletromagnetico. Significa que um
sinal eletrico e usado para acionar o motor e toda vez que ele recebe um pulso eletrico gira
um determinado angulo de rotacao. Nesse projeto foi utilizado o Arduino como mediador
para o controle desses pulsos eletricos. Diferentemente de um motor DC (corrente con-
tınua) que gira continuamente e com rotacao controlada por circuitos externos, o motor
de passo necessita que sua alimentacao seja feita de forma sequencial e repetida.4
Figura 11: Motor de Passo.
Fonte: http://www.orientalmotor.de/de/uploads/documents/21122005144800.pdf
A Figura 11 mostra duas secoes transversais de um motor de passo hıbrido. Esses
motores sao constituıdos essencialmente de duas partes, o estator (trave fixa onde as
bobinas sao enroladas) e o rotor (conjunto eixo-ima que rodam na parte movel do motor).
O funcionamento do motor de passo ocorre da seguinte maneira. Ocorre a energizacao
de uma bobina de cada vez, que produz um campo magnetico fazendo com que o rotor se
desloque, ja que ele pode ser magnetizado, ou seja, esse campo magnetico faz com que as
”pas”do rotor se alinhem com as linhas de campo magnetico. Dessa forma se as bobinas
forem energizadas de forma sequencial e repetida ocorre a rotacao do motor5.
4Acessado em: http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf5Acessado em: http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf

24
Existem algumas configuracoes de rotacao para um motor de passo, como passo-a-
passo e meio passo, ambas mostradas na Figura 12. O passo-a-passo ocorre de tal forma
que ha o acionamento de apenas uma bobina de cada vez. O meio passo consiste em girar
a metade de um passo, acionando-se duas bobinas e depois uma de cada vez. Essas duas
representacoes ficam evidentes ao se observar a sequencia de acionamento na Figura 12,
onde as bobinas de cor vermelha estao energizadas e as demais desligadas.6
Figura 12: Simplificacao do Funcionamento do Motor de Passo.
Fonte: http://www2.eletronica.org/artigos/outros/estudo-do-motor-de-passo-e-seu-controle-digital
Algumas das vantagens de se utilizar o motor de passo para esse projeto e que o
angulo de rotacao e proporcional a quantidade pulso de entrada e dessa forma pode-se
ter uma medida de quantas rotacoes ele executou e entao pode-se determinar quanto o
sensor percorreu, proporcionando erros bem pequenos, com menos de 3,5% de erro que
foram obitido experimentalmente. Outro fato importante a se ressaltar e que o motor de
passo admite uma excelente resposta para parar e iniciar o movimento.
6Acessado em: http://www2.eletronica.org/artigos/outros/estudo-do-motor-de-passo-e-seu-controle-digital

25
4 SOFTWARE
4.1 ARDUINO
O Arduino utiliza um IDE 1 escrito em Java derivado do que foi feito para Processing
e Wiring. Seu principal objetivo e facilitar a programacao de controle do hardware. Apos
escrever o programa, com apenas um clique do mouse e possıvel fazer um upload do
programa para o Arduino um dos fatos que evidencia a simplicidade de seu uso.2
Existem duas funcoes basicas para criar um programa:
• setup() funcao chamada apenas uma vez no inıcio do programa, geralmente utilizada
para a inicializacao de variaveis e/ou parametros.
• loop() funcao que fica em um laco infinito de repeticao enquanto o dispositivo per-
manece ligado.
4.1.1 Sketch do Arduino
O IDE do Arduino trata como sketch o programa embarcado que e responsavel por
fazer a leitura na porta analogica em que o sinal de saıda do amplificador entra e enviar
comandos para o Motor de Passo bem como realizar a comunicacao com o computador,
recebendo ordens de movimento - esquerda, direita - e enviando o dados coletados da
porta analogica - de 0 a 1023, 10 bits de resolucao.
A sequencia de operacao e: o computador envia uma informacao para o Arduino de
quantos passos o motor deve realizar. O Arduino, por sua vez, envia os bits necessarios
para o motor atraves da porta digital a que este esta conectado. Assim que o movimento
foi realizado, o Arduino envia de volta ao computador o valor de tensao lido pela porta
analogica 1.
1Ambiente Integrado para Desenvolvimento2Maiores informacoes disponıveis em www.arduino.cc
26
4.2 JAVA
A linguagem de programacao Java foi originalmente criada pela Sun Microsystems,
atualmente pertencente a Oracle, e lancada oficialmente em 1995. Em sintaxe, derivou-se
muito de C e C++, mas possui um sistema mais simples quando trata-se dados em baixo
nıvel. Quando compilada, tipicamente e gerado um bytecode que pode ser entendido pela
JVM (Java Virtual Machine) o que permite a linguagem uma boa adaptabilidade quanto
ao quesito multi-plataformas.
A escolha da linguagem Java deu-se devido ao fato de ja possuir varias bibliotecas
prontas com varios tipos de aplicabilidades, sendo que grande parte de licenca GNU, como
comunicacao com dispositivos seriais e interface grafica. Outro fato foi de independer da
arquitetura do computador possibilitando que rode tanto em maquinas Linux, quanto
Windows.3
4.2.1 Programa em Java
Foi implementado um software em Java que e utilizado no computador em que o
Arduino esta conectado. Dessa forma o usuario pode configurar os parametros de aquisicao
de dados que deseja como:
1. Resolucao - de quanto em quanto o motor irar girar
2. Distancia - da distancia total percorrida
O item 1 se refere a resolucao que o usuario deseja discretizar o intervalo de distancia
em mm ou cm especificado no item 2 (e.g. se o usuario escolher 1mm como resolucao e
30cm como distancia, o programa fara com que o sensor leia 300 valores de intensidade
de campo magnetico dentro dos 30cm). Ao final da execucao, o grafico estara disponıvel
para ser visualizado e o programa fara com que o sensor retorne a origem do trilho.
Na Figura 13 pode ser observada a tela inicial do programa com a janela de configu-
racao de parametros aberta e, na Figura 14 pode ser visualizado um exemplo do modelo
de grafico.
3Maiores informacoes disponıveis em: http://www.java.com/pt BR

27
Figura 13: Tela inicial do programa
Figura 14: Exemplo do modelo de grafico

28
5 CONSTRUCAO
5.1 CONSTRUCAO DO AMPLIFICADOR
Foi necessaria a construcao do amplificador para proporcionar uma melhor leitura
pelo Arduino ja que os parametros de entrada do mesmo deve variar em torno de 0 a 5
volts e a variacao que o sensor proporciona e de 1,4V a 3,6V nos testes que foram feitos
com o sensor A1302. Sendo assim, deve-se construir uma configuracao de forma que a
tensao de entrada e de saıda do amplificador varie como mostrado na figura 15.
Figura 15: Grafico Vo por Vi
Com 2 pares de pontos da reta da figura 15 e a formula do amplificador de diferenciacao
e possıvel determinar os valores dos resistores e o de tensao para colocar a varicao da saıda
do sensor na faixa proposta da seguinte maneira:
Com a equacao (15) caracterıstica do amplificador subtrator, e os pares de pontos
obtem-se:

29
V0 =(R1 + R2) R4
(R4 + R3) R1V2−
R2
R1V1 (18)
Em (18), fazer R1 = R3, R2 = R4 e
A =R2
R1(19)
Tem-se que V0 = A V2−A V1, fazendo:
−A V1 = B (20)
Temos:
V0 = A V2 + B (21)
Usando a equacao (21) e analisando o grafico da figura 15 com os pontos (1,4;0,5),
(3,6;4,5), temos o seguinte sistema: 0,5 = 1,4 A + B
4,5 = 3,6 A + B
Resolvendo o sistema obtem-se: A = 1,81 e B =−2,016V .
Isolando-se V1 em (20) e substituindo os respectivos valores obtem-se V1 = 1,11V
Adotando valor para R1 = 1K e utilizando a formula (19), temos:
R2 = A R1 = 1,81k
A Tensao de entrada do amplificador V2 e a tensao de saıda do sensor hall. Ja a saıda
do amplificador e ligada diretamente a entrada analogica ”1” do Arduino.
Dessa forma possuem-se as caracterısticas do amplificador que sera utilizado.
5.2 CONSTRUCAO DOS REGULADORES DE TENSAO
Como para pequenas variacoes da tensao V1 do amplificador ou para a tensao de
alimentacao do sensor de efeito hall, varia a tensao de saıda significantemente, e com isso
ocorre um erro de medida, foram utilizados circuitos para a regulacao de tensao nesses
dois casos, com a finalidade de estabilizar essas tensoes em pontos desejados. Para o
primeiro caso foi utilizada a configuracao com o regulador LM317 conforme mostrado na
Figura 16.

30
Figura 16: Configuracao do LM317.
Fonte: http://www.datasheetcatalog.com/datasheets pdf/L/M/3/5/LM358.shtml
Apos a montagem do esquema da figura 16, foi variado o potenciometro R2 e o valor
mais proximo que foi obtido da tensao V1 = 1.11V (tensao de entrada do amplificador) foi
de 1.25V com o resistor em 0 , ou seja, um curto circuito.
Para a configuracao do regulador para a alimentacao do sensor, foi utilizado o LM7805
(Figura 17) que por si so ja proporciona uma tensao de saıda de 5 V constante.
Figura 17: Configuracao do LM7805.
Fonte: http://freedatasheets.com/blog/uploaded images/7805datasheet-730100.gif
Como o consumo de corrente tanto da entrada V1 do amplificador quanto do sensor e
baixa nao necessitou de dissipadores de calor conectados aos reguladores de tensao.
Os capacitores que fazem parte dos circuitos demonstrados acima possuem como
funcao diminuir as oscilacoes do circuito.

31
5.3 CONTROLADOR ULN2003
Para o controle do motor de passo foi utilizado o ULN2003 que nada mais e que
arrays de transistores Darlington que controlam correntes de ate 500mA para motores de
passo.[DATASHEET ULN2003] Na figura Figura 18 tem-se o esquematico da alimentacao
do motor, das entradas e saıdas do ULN2003. As entradas 1, 2, 3, 4 do ULN2003 sao os
pinos digitais 8, 9, 10, 11 do Arduino. As saıdas 13, 14, 15, 16 do ULN2003 sao conectadas
as bobinas 4, 3, 2, 1 do motor de passo, respectivamente.
Figura 18: Esquematico ULN2003.
Fonte: http://www2.eletronica.org/forum-de-discussoes/geral/718862060/870261885/circuitouln.gif
5.4 CIRCUITO COMPLETO
Com o amplificador calculado e utilizando os reguladores de tensao descritos na sessao
de construcao assim como o controlador ULN2003 para controlar o motor, foi obtido o
esquematico na Figura 19. O esquematico foi dividido em blocos para facilitar o entendi-
mento.
• Bloco 1: bloco responsavel por uma das tencoes de entrada do amplificador cujo
valor e 1.11V.
• Bloco 2: bloco responsavel pela amplificacao da saıda do sensor.
• Bloco 3: bloco responsavel pela tensao de alimentacao do sensor A1302.
• Bloco 4: Bloco responsavel pelo controle do motor de passo.

32
Os calculos de cada bloco pode ser vistos da secao de construcao.
Figura 19: Esquematico Completo
33
6 CALIBRACAO
6.1 MOTOR
6.1.1 Utilizando o motor de passo
Para utilizar o motor Motortech S35S5, primeiramente foi procurado pelo seu datasheet,
entretanto, por ter sido retirado de um equipamento, scanner, antigo, nao foi possıvel en-
contrar o datasheet indicando de como opera-lo.
Quando e necessario que um motor de passo gire um passo, e necessario ativar alguma
de suas bobinas, isso e feito por uma ativacao em uma string de 4 bits, um para cada
bobina, de 0000 para nenhuma bobina ativada, ate 1111 para todas ativadas. Para o
motor girar e necessario que haja uma repeticao de strings enviada periodicamente. Ex :
1100, 0011, 1100, 0011
Para configura-lo, entao, foi utilizado o metodo da tentativa e erro para descobrir qual
foi pertencia a qual bobina, pois como eram poucas possibilidades de resultado, o tornava
viavel.
O resultado da configuracao foi que para movimentar o motor para esquerda, o envio
dos bits devem ser 0010 0001 0010..., caso o deslocamento seja feito para a direita o bits
devem ser 1000 0100 1000 ....
6.1.2 Calibracao do motor
Para calibrar o motor foi utilizado um paquımetro, e um software que indique a quan-
tidade de passos que o motor ira realizar. Entao, a partir disso, foi medido o deslocamento
causado pelo motor por essa quantidade de passos, e entao refeito o mesmo experimento
para a mesma quantidade de passos tres vezes, em seguida, foi realizada uma media dos
valores obtidos. Esse experimento foi refeito para varias quantidades de passos a fim de
obter uma equacao que forneca a conversao de passos para milımetros. Esses dados podem
ser vistos na 6.1.2:

34
Passos Milımetros Passos Milımetros
5 1.25 20 6.07
5 1.30 20 6,06
5 1.25 20 6,14
10 2.8 25 7.7
10 2.85 25 7.7
10 2.9 25 7.6
15 4.5 30 9.3
15 4.5 30 9.3
15 4.5 30 9.3
Tabela 1: Quantidade de passos por deslocamento de motor em milımetros
A partir dos dados da Tabela 1 foi possıvel tracar um grafico e realizar uma regressao
linear para encontrar uma funcao. Como esperado, a funcao encontrada e de primeiro
grau como mostra a Figura 20.
Figura 20: Grafico que demonstra os dados obtidos no processo de calibragem domotor de passo
Apos poder mensurar qual a quantidade de milımetros cada passo desloca, e possıvel
saber qual o deslocamento mınimo possıvel para o motor, e assim qual sera a precisao do
motor para o envio de dados coletados do sensor.
Realizando uma regressao linear a partir do grafico da Figura 20 foi obtido:

35
S(n) = 0.322n−0.34 (22)
Em que S e a distancia percorrida em milımetros e n o numero de passos do motor.
Foi percebido que a resolucao do motor de passo e consideravelmente alta, de ordem
milimetrica, pois como ele foi retirado de um scanner, provavelmente e um motor de passo
com finalidades de uso em que precisao e um importante requisito.
6.2 SENSOR
6.2.1 Calibracao do Sensor
6.2.2 Por meio de dados teoricos
Para determinar qual e o campo incidente sobre o sensor, e necessario que seja trans-
formada a tensao saıda do sensor, dependente da tensao Hall resultante, em Gauss uti-
lizando a formula de sensibilidade presente no datasheet do sensor. Como utilizamos o
sensor A1302, foi visto que o campo magnetico em funcao de sua sensibilidade ser descrita
como :
~B = Ssensor (Vout−VQ) (23)
Considerando Vout a tensao de saıda do sensor em milivolts e ~B em gauss, Ssensor a
sensibilidade do sensor e VQ a tensao quiescente do sensor.
Entretanto, como utilizamos um amplificador externo para aumentar o ganho do sen-
sor, e necessario efetuar esse ajuste com a sensibilidade do sensor. Como o ganho e feito
sobre a saıda do sensor, temos :
B = (Av( Vsensor−VQ)) Ssensor (24)
Em que VSensor e a saıda do sensor, Av e o ganho do amplificador, VQ e a tensao quies-
cente e Ssensor e a sensibilidade do sistema, entretanto como utilizamos um amplificador
subtrator, esse adiciona uma constante c a formula gerando:
B = ((Av + c)( Vsensor−VQ)) Ssensor (25)
Como calculado teoricamente, o ganho do amplificador e de 1,78. Entretanto, por
nao utilizarmos componentes de alta precisao, na pratica, esse valor caiu para 1.74 como
36
pode ser visto na Figura 21.
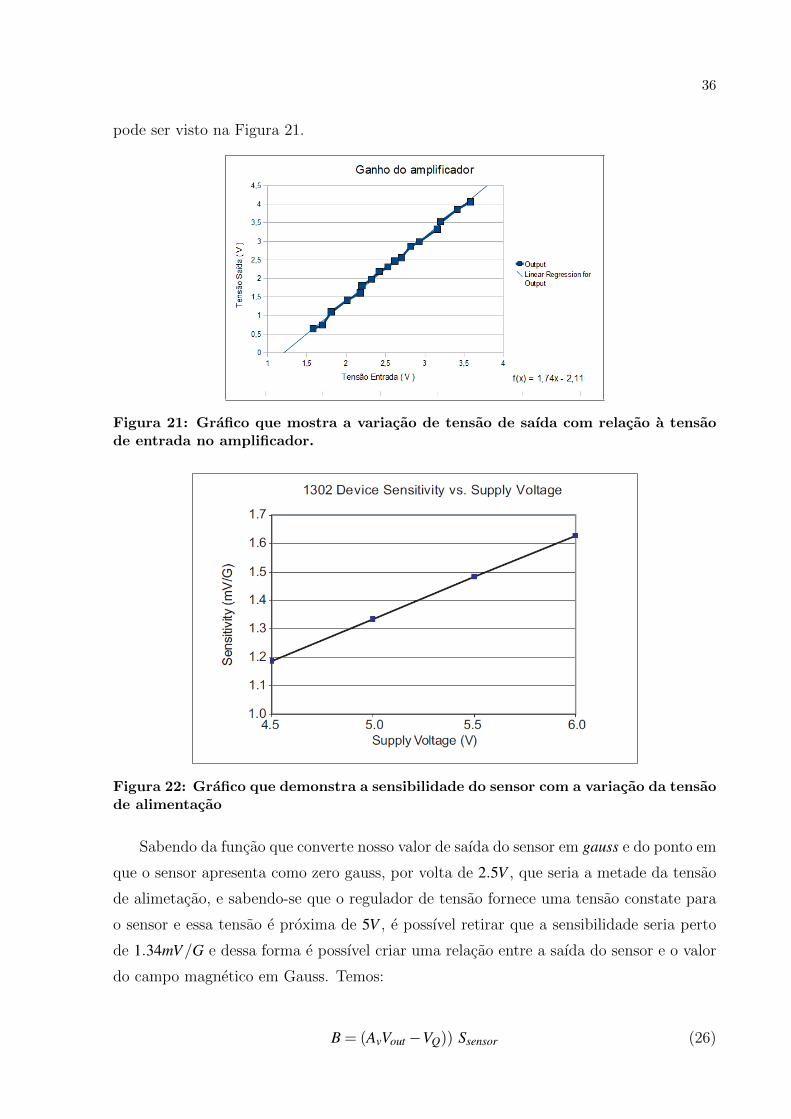
Figura 21: Grafico que mostra a variacao de tensao de saıda com relacao a tensaode entrada no amplificador.
Figura 22: Grafico que demonstra a sensibilidade do sensor com a variacao da tensaode alimentacao
Sabendo da funcao que converte nosso valor de saıda do sensor em gauss e do ponto em
que o sensor apresenta como zero gauss, por volta de 2.5V , que seria a metade da tensao
de alimetacao, e sabendo-se que o regulador de tensao fornece uma tensao constate para
o sensor e essa tensao e proxima de 5V , e possıvel retirar que a sensibilidade seria perto
de 1.34mV/G e dessa forma e possıvel criar uma relacao entre a saıda do sensor e o valor
do campo magnetico em Gauss. Temos:
B = (AvVout−VQ)) Ssensor (26)

37
Considerando a sensibilidade conforme mostra na Figura 21 sendo a tensao de alimen-
tacao do sensor 5V - definida pelo regulador de tensao -, e considerando que nao existe
uma tensao de o f f set que e dada pelo amplificador subtrator temos :
B = 1.74∗1.34∗ (Vout−2.54) (27)
Considerando Ssensor a sensibilidade do sensor, Av o ganho do amplificador, Vout a saıda
do sensor e VQ o ponto quiescente do sensor.
Como a leitura do Arduino e dada com uma saıda de 10 bits, este valor varia entre 0 e
1023, gerando uma curva de 4.8mV/bit, e o amplificador utilizado adiciona uma constante
a formula devido ao o f f set, aplicando estes fatos, a formula geral de calibracao do sensor
a partir do dado analogico encontrado pelo Arduino.
B =
( 5 Sanalogica1024 +c
Av
)Ssensor Gauss(28)
B =
( 5 Sanalogica1024 + 2.106
1.744
)1.34 103Gauss (29)
B = 3,75 SAnalogico + 1,618 (30)
Em que Sanalogica e a saıda do Arduino que vai de 0 a 1023, c e a constante obtida do
amplificador, Av e o ganho do amplificador, Ssensor e a sensibilidade do sensor, 5 e 1024 e
a conversao do dado em bits do Arduino para Volts.
Os dados obtidos por meio desta calibracao, pode ser visto na tabela 3.
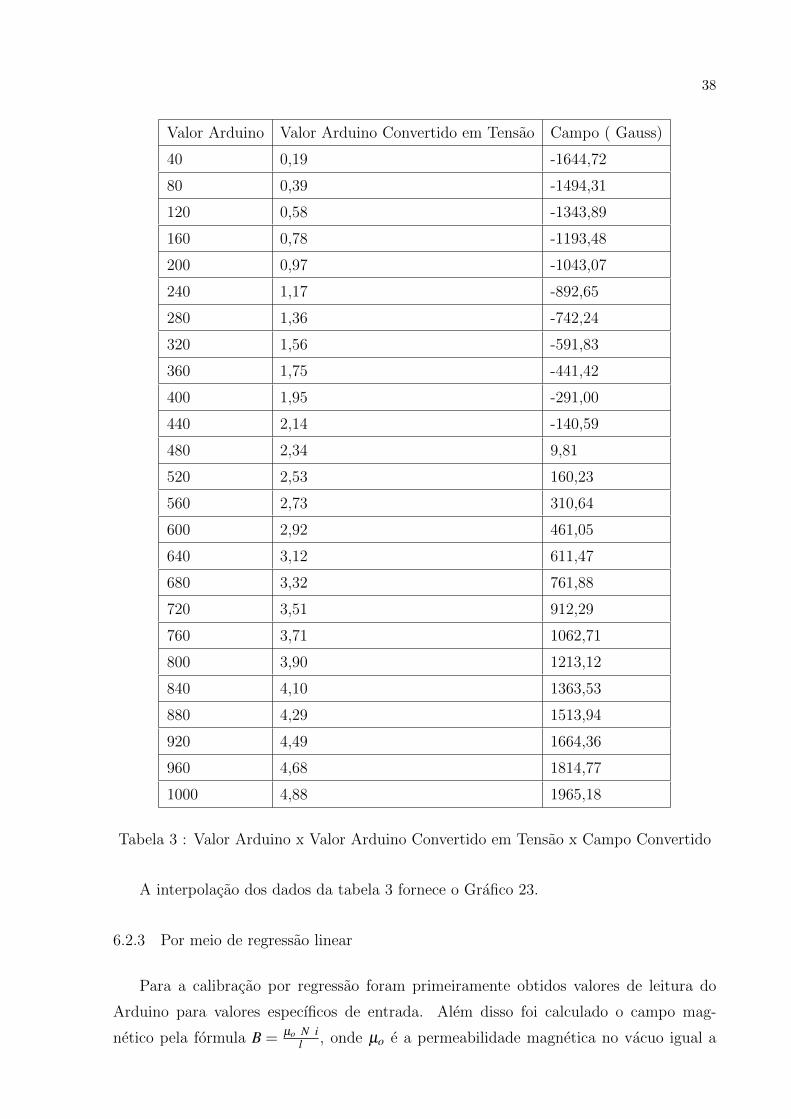
38
Valor Arduino Valor Arduino Convertido em Tensao Campo ( Gauss)
40 0,19 -1644,72
80 0,39 -1494,31
120 0,58 -1343,89
160 0,78 -1193,48
200 0,97 -1043,07
240 1,17 -892,65
280 1,36 -742,24
320 1,56 -591,83
360 1,75 -441,42
400 1,95 -291,00
440 2,14 -140,59
480 2,34 9,81
520 2,53 160,23
560 2,73 310,64
600 2,92 461,05
640 3,12 611,47
680 3,32 761,88
720 3,51 912,29
760 3,71 1062,71
800 3,90 1213,12
840 4,10 1363,53
880 4,29 1513,94
920 4,49 1664,36
960 4,68 1814,77
1000 4,88 1965,18
Tabela 3 : Valor Arduino x Valor Arduino Convertido em Tensao x Campo Convertido
A interpolacao dos dados da tabela 3 fornece o Grafico 23.
6.2.3 Por meio de regressao linear
Para a calibracao por regressao foram primeiramente obtidos valores de leitura do
Arduino para valores especıficos de entrada. Alem disso foi calculado o campo mag-
netico pela formula B = µo N il , onde µo e a permeabilidade magnetica no vacuo igual a

39
Figura 23: Grafico da curva de entrada do sensor relacionada a saıda em Gauss
4 π 10−7 T mA , N o numero de espiras e l o comprimento do solenoide (ver figura 24), com
esses dados foi construıdo a seguinte tabela:
Valor Arduino Corrente(A) Campo Magnetico calculado (G)
119 2,9 202,45
154 2,52 175,92
206 2,08 145,21
246 1,76 122,87
280 1,48 103,32
302 1,3 90,75
324 1,14 79,58
350 0,93 64.92
379 0,69 48,17
405 0,48 33,51
427 0,29 20,25
454 0,14 9,77
456 0,09 6,28
Tabela 2: Valor Arduino x Corrente x Campo Magnetico
Valores lidos pelo pelo Arduino recebidos do sensor amplicado vindos de um campo
induzido em um solenoide pela corrente A da coluna 2 que geraria um campo representado
pela coluna 3.
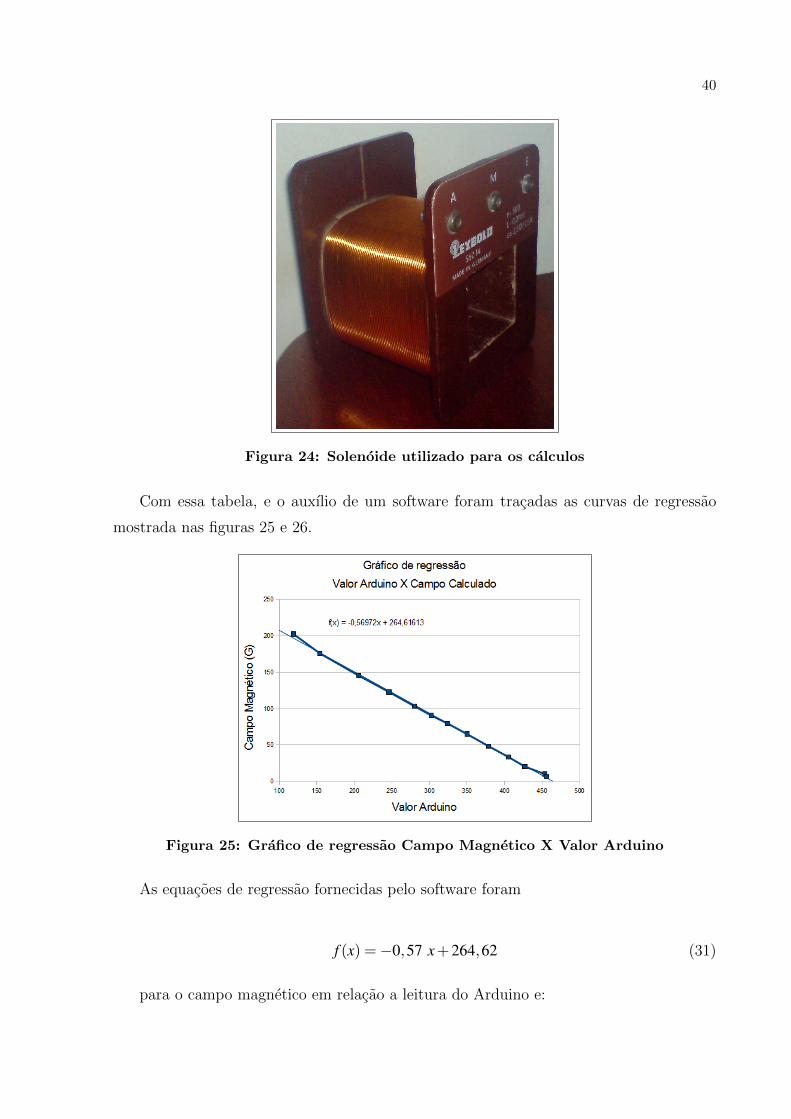
40
Figura 24: Solenoide utilizado para os calculos
Com essa tabela, e o auxılio de um software foram tracadas as curvas de regressao
mostrada nas figuras 25 e 26.
Figura 25: Grafico de regressao Campo Magnetico X Valor Arduino
As equacoes de regressao fornecidas pelo software foram
f (x) =−0,57 x + 264,62 (31)
para o campo magnetico em relacao a leitura do Arduino e:

41
Figura 26: Grafico de regressao Corrente X Valor Arduino
f (x) =−8,16.10−3 x + 3,79 (32)
para a corrente no solenoide em relacao a leitura do Arduino.
Com essas equacoes e possıvel obter o campo magnetico para qualquer valores de
campo magnetico entre 202,45 e 6,28Gauss.
Sendo assim para se obter o campo magnetico ou a corrente no solenoide basta utilizar
as respectivas equacoes:
B(x) =−0,57 x + 264,62 (33)
I(x) =−8,16.10−3 x + 3,79 (34)
onde x representa a leitura que o Arduino retorna que varia de 0 a 1023.

42
7 CONCLUSAO
7.1 RESULTADOS OBTIDOS
Foram feitos dois tipos de calibracao, a calibracao por meio de dados teoricos e uti-
lizando os dados provenientes do datasheet e utilizando de calculos para mensurar o ganho
obtido pelo amplificador que permite um dado que teoricamente estaria correto.
Porem oo fazer a analise dos resultados nao foi obtido dados proximo dos dados
reais previamente calculado e dessa forma foi optado por utilizar-se de outro metodo, o
metodo da regressao linear, que consise em comparacoes dos valores lido pelo Arduino e
ja amplificado com um resultado calculado teoricamente utilizando um solenoide.
Primeiro metodo
O primeiro metodo pode ser considerado mais preciso, porque sua formulacao tem
origem teorica com calculos fundamentados, entretanto, nao foi possıvel realizar uma com-
paracao com um dado pratico. Por exemplo, utilizando um solenoide e possıvel calcular
o campo magnetico em seu centro e comparar com o obtido atraves da funcao. Ademais,
nao foi possıvel posicionar o sensor exatamente no centro do solenoide e no centro de seu
raio, e nao foi possıvel chegar a uma conclusao que, pelo fato de o solenoide ser pequeno
nao se tem a garantia que o campo magnetico chegava a ser constante, outra possibilidade
seria utilizar um gaussımetro, mas sua indisponibilidade impossibilitou o uso do mesmo.
Quando foi tentado acoplar mais de um solenoide para aumentar a regiao no interior
do mesmo, essa possibilidade nao obteve muito sucesso, pois existe uma regiao entre os
solenoides que nao ha espiras o que faz com o que o campo magnetico nao permaneca
constante.
Segundo metodo
Esse metodo pode ser considerado mais pratico, pois estarıamos aceitando que o campo
magnetico seria constante no centro do solenoide e o posicionamento do sensor estaria tao
proximo do centro que o erro causado por isso seria desprezıvel, esse metodo gera uma
43
calibracao que os resultados se aproximam mais dos dados calculados, entretanto nao
ha uma garantia que o campo medido e realmente aquele, pois estaria sendo forcado
que o resultado obtido naquela posicao seria igual ao calculado. Este valor e facilmente
recalibrado, pois e apenas necessario que seja feita uma regressao para achar a relacao de
entrada com o campo magnetico.
Dessa forma destacam-se as seguintes fontes de erro:
• Ao medir-se o campo magnetico foi considerado o solenoide com comprimento in-
finito;
• Para considerar o comprimento infinito foi colocado mais de um solenoine, entretanto
nao era possıvel acoplar de forma que o numero de espiras por comprimento ficasse
constante;
• Nao tinha-se outro equipamento para a comparacao dos resultados.
7.1.1 Projetos futuros
Nesse projeto foi desenvolvido um sistema de hardware e software que auxilia no
ensino de Fısica, mais especificamente, no ensino da parte da Fısica que envolve campos
magneticos. Esse sistema facilita ao estudante a visualizacao da relacao existente entre
intensidade do campo magnetico e a distancia a fonte do campo atraves do grafico tracado
com os dados obtidos do sensor de efeito Hall.
Os teste foram realizados com o auxılio de um solenoide de 11mH e uma fonte de
alimentacao de tensao e corrente variaveis. O do fato preponderante da escolha do sensor
foi que a sua resposta e linear.
Como futuros incrementos para esse projeto pode-se destacar:
• Utilizar mais motores de passo no controle do sensor a fim de se obter mais graus de
liberdade no seu movimento, haja visto que nesse sistema foi utilizado apenas movi-
mentos em uma dimensao. Isso possibilitaria o estudo mais complexo da intensidade
do campo magnetico.
• Construir o sistema de maneira que nao dependa do computador para produzir os
graficos e os dados, utilizando-se, por exemplo, de um display grafico. Com essa
melhoria, seria mais facil o manuseio do sistema, permitindo, por exemplo, que o
mesmo fosse utilizado em bancadas de Fısica para auxiliar o seu ensino.

44
• Acoplar mais de um sensor de efeito Hall para o mapeamento em tres dimensoes
do campo magnetico. Seria necessario, entao, o ajuste do software para que ele
trabalhasse com graficos em tres dimensoes.
45
8 REFERENCIAS BIBLIOGRAFICAS
1. NUSSENZVEIG, Moyses H. Curso de Fısica Basica, Primeira edicao, 1997.
2. TIPLER, Paul A. Fısica para Engenheiros, Sexta edicao, Vol. 2, 2009.
3. Boylestad, Robert L. Dispositivos Eletronicos e Teoria de Circuitos, Sexta Edicao
1998.
4. Millman, Jacob, Eletronica, Primeira Edicao, Volume 1, 1981.
5. http://sisnema.com.br/areas/Academics.htm
6. http://www.eeel.nist.gov/812/images/fig1.jpg
7. http://www.banasmetrologia.com.br
8. http://www2.eletronica.org/artigos/outros/estudo-do-motor-de-passo-e-seu-controle-
digital
9. http://www.solarbotics.net/library/pdflib/pdf/motorbas.pdf
10. http://www.periodicos.ufsc.br/index.php/fisica/article/viewFile/11887/11138
11. http://www.arduino.cc
12. http://www.orientalmotor.de/de/uploads/documents/21122005144800.pdf
13. http://www.datasheetcatalog.com/datasheetspd f
14. http://freedatasheets.com/blog/uploadedimages/7805datasheet−730100.gi f
15. http://www2.eletronica.org/forum-de-discussoes/geral/718862060/870261885/circuitouln.gif
16. http://wiring.org.co
17. http://processing.org/

46
18. http://www2.warwick.ac.uk/fac/sci/physics/research/
19. condensedmatt/silicon/members/leadley
20. Mosser, Vicent, United Stats Patent 5,442,221, 15 Agosto 1995, Hall Effect Sensor.