universidade federal rural do semi-Árido campus … - anderson... · universidade federal rural do...
TRANSCRIPT

UNIVERSIDADE FEDERAL RURAL DO SEMI-ÁRIDO
CAMPUS ANGICOS
DEPARTAMENTO CIÊNCIAS EXATAS, TECNOLÓGICAS E
HUMANAS - DCETH
CURSO DE CIÊNCIA E TECNOLOGIA
ANDERSON CARLOS DOS SANTOS BRITO
ANÁLISE DE UMA SUSPENSÃO AUTOMOTIVA USANDO DINÂMICA
MULTICORPOS
ANGICOS-RN
2013

ANDERSON CARLOS DOS SANTOS BRITO
ANÁLISE DE UMA SUSPENSÃO AUTOMOTIVA USANDO DINÂMICA
MULTICORPOS
Monografia apresentada à Universidade
Federal Rural do Semi – Árido – UFERSA,
Campus Angicos, para a obtenção do título
de Bacharel em Ciência e Tecnologia.
Orientador: Profº. Dr. Alex Sandro de
Araújo Silva.
ANGICOS-RN
2013


Dedico este trabalho à toda minha família, em
especial minha mãe Sheila Carlos dos Santos,
por terem me apoiado sempre nos momentos
mais difíceis da minha vida e por acreditarem
no meu potencial para esta conquista.

AGRADECIMENTOS
Em primeiro lugar gostaria de agradecer à Deus por ter me dado a oportunidade de estar aqui
nesse momento e me deu a coragem para sempre seguir em frente e de tomar decisões
corretas na minha vida.
Agradeço aos meus pais que sempre me incentivaram nessa etapa da minha vida, por terem
me educado da melhor forma possível, por terem sempre mim incentivado a corre atrás dos
meus objetivos e de não desistir deles mesmo havendo alguma dificuldade e por terem sempre
me apoiado nos momentos de dificuldade.
A minha avó, Francisca Carlos, uma pessoa muito importante na minha vida, sempre que eu
preciso dela não importa para quê, ela sempre estará disposta a fazer sem medir esforços.
A minha irmã Maria Rita Santos, que me apóia em todos os momentos e também por se sentir
realizada com a minha vitoria.
Gostaria também de agradecer ao meu orientador, Profº. Dr. Alex Sandro de Araújo, por ter
acreditado na minha capacidade e por ter me ajudado no desenvolvimento e conclusão dessa
tarefa.
Aos professores, Profº. Me. Marcio Furukava e o Profº. Me. Marcus Vinicius Souza
Rodrigues, que estiveram à disponibilidade de estarem presentes na bancada e foram
fundamentais na correção e aprimoramento do meu texto.
Aos meus amigos de curso, Felipe Jales, Bruno Câmara, Plácido Carlos, Jefferson Bruno e ao
demais, que de alguma maneira tornam minha vida acadêmica cada dia mais desafiante e
pelos momentos de lazer que foram essências neste percurso onde rimos e nos ajudamos
mutuamente. Peço a Deus que os abençoe grandemente, preenchendo seus caminhos com
muita paz, amor, sucesso, saúde e prosperidade.

Nunca pense que o sucesso deve-se somente
ao seu próprio desempenho. Se você começar
a ouvir apenas a si mesmo, você dará o
primeiro passo em direção ao fundo. As flores
da vitória pertencem a muitos.
Michael Schumacher
RESUMO
O sistema de suspensão de um veículo é responsável por absorver os impactos
causados pelas irregularidades no solo. O presente trabalho tem como objetivo analisar uma
suspensão automotiva utilizando dinâmica multicorpos. Antes da realização dessa análise foi
feito um levantamento teórico sobre a metodologia utilizadas nos software multicorpos para o
desenvolvimento de produtos, sobre as suspensões automotivas existentes e os elementos
elásticos e estruturais que compõe um sistema de suspensão. Para a realização da análise o
sistema de suspensão foi submetido a duas simulações no software NX 8.0. A primeira
simulação o sistema de suspensão era composto por elementos elásticos usados em carros de
passeio, já na segunda simulação o sistema de suspensão era composto por elementos
elásticos usados em carros off-road. Ao final das simulações foram apresentados resultados
das analises sobre o deslocamento ocorrido no sistema de suspensão e a força exercida pelo
sistema de suspensão. Com esses resultados pode-se analisar como um sistema de suspensão
automotiva se comporta com a utilização de diferentes elementos elásticos.
Palavras-chave: Suspensões automotivas. Sistemas multicorpos. Simulação. NX 8.0.
ABSTRACT
The suspension system of a vehicle is responsible for absorbing the impacts caused by
irregularities in the soil. This study aims to analyze automotive suspension using multibody
dynamics. Before performing this analysis was made on a theoretical methodology used in the
multibody software for product development on the existing automotive suspensions and
elastic and structural composing a suspension system. To perform the analysis suspension
system underwent two simulations in software NX 8.0. The first simulation the suspension
system was composed of elastic elements used in cars, in the second simulation the
suspension system was composed of elastic elements used in off-road cars. At the end of the
simulations were presented results of analysis on the displacement occurred in the suspension
system and the force exerted on the suspension system. These results can be analyzed as an
automotive suspension system behaves with the use of different elastic element.
Keywords: Automotive suspensions. Multibody systems. Simulation. NX 8.0.

LISTA DE FIGURAS
Figura 1 - Exemplos de sistemas mecânicos que podem ser modelados pelas técnicas MBS . 20
Figura 2 - Tipos de juntas ........................................................................................................ 21
Figura 3 - Origem das forças que agem sobre os sistemas mecânicos .................................... 22
Figura 4 - Restrições nos modelamentos MBS ....................................................................... 23
Figura 5 - Esquema básico de uma suspensão veicular ............................................................ 28
Figura 6 - Cambagem positiva e negativa ................................................................................ 29
Figura 7 - Convergência positiva e negativa ........................................................................... 29
Figura 8 - Ângulo caster .................................................................................................................... 30
Figura 9 - Sistema de suspensão Eixo Rigido .................................................................................. 32
Figura 10 - Sistema de suspensão Hotchkiss ................................................................................... 33
Figura 11 - Sistema de suspensão Four Link ................................................................................... 34
Figura 12 - Sistema de suspensão De Dion ...................................................................................... 35
Figura 13 - Sistema de suspensão Swing Axle ................................................................................ 36
Figura 14 - Sistema de suspensão Trailing Arm ............................................................................. 37
Figura 15 - Sistema de suspensão Semi Trailing Arm ................................................................... 37
Figura 16 - Sistema de suspensão Multi Link .................................................................................. 38
Figura 17 - Sistema de suspensão MacPherson ............................................................................... 39
Figura 18 - Sistema de suspensão Short Long Arm (SLA) ........................................................... 40
Figura 19 - Feixe de molas Semi-Elipticas ...................................................................................... 42
Figura 20 - Feixe de molas Semi-Elipticas do tipo parabólica ...................................................... 42
Figura 21 - Molas Helicoidais............................................................................................................ 43
Figura 22 - Molas Pneumática ........................................................................................................... 45
Figura 23 - Amortecedor Hidráulico ................................................................................................. 46
Figura 24 - Amortecedor Pressurizado ............................................................................................. 47
Figura 25 - Barra Estabilizadora ........................................................................................................ 48
Figura 26 - Pinos Esféricos ................................................................................................................ 48
Figura 27 - Bandeja de Suspensão .................................................................................................... 49
Figura 28 - Modelo da suspensão gerada no NX ............................................................................ 51
Figura 29 - Juntas do modelo da suspensão ......................................................................................... 51
Figura 30 - Plataforma de teste gerada no NX ................................................................................ 52
Figura 31 - junta utilizada na plataforma de teste ........................................................................... 53
Figura 32 - Conjunto suspensão e plataforma de teste ................................................................... 54

LISTA DE GRÁFICOS
Gráfico 1 – Deslocamento vertical da suspensão utilizando elementos elásticos usados em
carros de passeio ....................................................................................................................... 55
Gráfico 2 – Força da suspensão utilizando elementos elásticos usados em carros de passeios
.................................................................................................................................................. 56
Gráfico 3 – Deslocamento vertical da suspensão utilizando elementos elásticos usados em
carros oof-road .......................................................................................................................... 57
Gráfico 4 – Força da suspensão utilizando elementos elásticos usados em carros off-road .............. 58
LISTA DE SIGLAS
CACE – Computer Aided Control Engineering
CAD – Computer Aided Design
CAE – Computer Aided Engineering
CDF – Computational Fluid Dynamics
DAE – Differential Algebraic Equations
FE – Finite Elements
MBS – Multibody Systems
ODE – Ordinary Differential Equations

SUMÁRIO
1 INTRODUÇÃO ................................................................................................................... 14
1.1 OBJETIVO ......................................................................................................................... 15
1.2 OBJETIVOS ESPECIFICOS ............................................................................................. 16
2 REVISÃO BIBLIOGRAFICA ........................................................................................... 16
2.1 DINÂMICA MULTICORPOS NO DESENVOLVIMENTO DE PRODUTOS...............16
2.2 TECNICAS DE MODELAGEM DE SISTEMAS MULTICORPOS .............................. 19
2.3 METODODOLOGIAS DE ANALISE DE SOFTWARES MULTICORPOS ................. 23
2.3.1 Formulação do Problema .............................................................................................. 24
2.3.2 Definição do Modelo ...................................................................................................... 24
2.3.3 Definição do Modelo Computacional ........................................................................... 24
2.3.4 Formulação do Sistema de Equações ........................................................................... 25
2.3.5 Resolução do Sistema de Equações .............................................................................. 25
2.3.6 Pós-processamento ........................................................................................................ 26
2.3.7 Avaliação e Conclusão ................................................................................................... 26
2.4 PRINCIPAIS TIPOS DE SISTEMAS DE SUSPENSÃO AUTOMOTIVAS ................... 27
2.4.1 Ângulo Camber .............................................................................................................. 28
2.4.2 Ângulo de Convergência ............................................................................................... 29
2.4.3 Ângulo Caster ................................................................................................................ 30
2.4.4 Massa Suspensa e Massa não Suspensão ..................................................................... 30
2.4.5 Centro de Rolamento .................................................................................................... 30
2.4.6 Suspensões Dependentes ............................................................................................... 31
2.4.6.1 Eixo Rígido ................................................................................................................... 31
2.4.6.2 Hotchkiss ...................................................................................................................... 32
2.4.6.3 Four Link ...................................................................................................................... 33
2.4.6.4 De Dion ........................................................................................................................ 34
2.4.7 Suspensões Independentes ............................................................................................ 35
2.4.7.1 Swing Axle ................................................................................................................... 35
2.4.7.2 Trailing Arm ................................................................................................................. 36
2.4.7.3 Semi Trailing Arm ........................................................................................................ 37
2.4.7.4 Multi Link ..................................................................................................................... 38
2.4.7.5 MacPherson .................................................................................................................. 38
2.4.7.6 Short Long Arm (SLA)................................................................................................. 39
2.5 PRINCIPAIS COMPONENTES DE UM SISTEMA DE SUSPENSÃO .......................... 40
2.5.1 Molas ............................................................................................................................... 41
2.5.1.1 Molas Semi-Elipticas .................................................................................................... 41
2.5.1.2 Molas Helicoidais ......................................................................................................... 42
2.5.1.3 Molas Pneumáticas ....................................................................................................... 44
2.5.2 Amortedores ................................................................................................................... 45
2.5.2.1 Amortecedor Hidráulico ............................................................................................... 46
2.5.2.2 Amortecedor Pressurizado ............................................................................................ 46
2.5.3 Barra Estabilizadora ..................................................................................................... 47
2.5.4 Pinos Esfericos ............................................................................................................... 48
2.5.5 Bandeja de Suspensão ................................................................................................... 48
3 METODOLOGIA ................................................................................................................ 49
3.1 O SOFTWARE NX ............................................................................................................ 49
3.2 MODELO DA SUSPENSÃO GERADA NO NX ............................................................. 50
3.3 MODELO DA PLATAFORMA DE TESTE ..................................................................... 52
4 SIMULAÇÃO E ANÁLISE DOS RESULTADOS .......................................................... 53
4.1 ANÁLISE DO MODELO DE SUSPENSÃO UTILIZANDO ELEMENTOS ELÁSTICOS
USADOS EM CARROS DE PASSEIO ................................................................................... 54
4.2 ANÁLISE DO MODELO DE SUSPENSÃO UTILIZANDO ELEMENTOS ELÁSTICOS
USADOS EM CARROS OFF-ROAD ..................................................................................... 56
5 CONCLUSÃO ...................................................................................................................... 59
REFERÊNCIAS ..................................................................................................................... 60

14
1 INTRODUÇÃO
Na indústria automobilística o desenvolvimento tradicional de projetos demandava um
enorme custo financeiro e longos períodos de tempo, isso devido ao fato de que as indústrias
tinham que construir e testar diversos protótipos antes que o produto chegasse à sua versão
final. Mas segundo Rezende (2007) isso vem mudando devido ao grande avanço tecnológico
nas ultimas décadas, associados ao desenvolvimento de softwares de simulação MBS
(Multibody Systems) o qual proporciona à indústria automobilística uma maior dinâmica no
desenvolvimento de seus produtos. Com o surgimento dessas ferramentas computacionais que
incorporam as tecnologias CAD (Computer Aided Design) e CAE (Computer Aided
Engineering) voltadas ao desenvolvimento de projetos permitiu à indústria automobilística
reduzir consideravelmente os custos e o tempo de desenvolvimento de seus produtos
(REZENDE, 2007).
Nos dias atuais existe um grande número de softwares comerciais à disposição de
engenheiros e projetista que permitem a elaboração de modelos computacionais com alto grau
de sofisticação e riqueza de detalhes para simulação de sistemas mecânicos como, por
exemplo, os veículos ou seus subsistemas em diversas condições de operação. Tais software
possuem algoritmos de otimização inseridos em seus próprios códigos ou podem ser
acoplados a programas específicos de otimização visando proporcionar a evolução automática
do projeto de um determinado sistema do veiculo até a uma configuração satisfatória,
podendo também fazer análise de projetos mecânicos para permitir uma compreensão de
todos os parâmetros de projetos (REZENDE, 2007).
Um dos subsistemas de um veículo que pode ter suas características analisadas com
um maior número de detalhes por um software multicorpos é o sistema de suspensão, que é
um mecanismo do veiculo que possibilita o movimento da roda em relação ao mesmo tendo
elementos elásticos para suportar cargas.
O sistema de suspensão automotiva tem como função impedir que as irregularidades
do pavimento sejam transmitidas para o veiculo. Há outras tarefas não menos importantes
como conserva as rodas em posição favorável nas curvas e em contato com o solo diante de
toda espécie de oscilação causada por irregularidade, por menor que seja. As suspensões
automotivas são sistemas desenvolvidos para permitir ao motorista o pleno controle do
veículo (SÁBOIA FILHO; NABARRETE, 2009). Pode-se afirmar que esses sistemas devem
desempenhar, com eficiência, três funções (GILLESPIE, 1992):

15
Isolamento – a função isolamento está diretamente relacionada ao conforto dos
passageiros durante os deslocamentos do automóvel. O isolamento consiste em
atenuar as irregularidades do terreno para que as vibrações sejam transferidas ao
habitáculo do automóvel com menor intensidade;
Aderência – já esta segunda função leva em consideração a capacidade das rodas do
veículo manterem-se ao solo, permitindo sempre a resposta solicitada quando o
motorista comanda acelerador, freio e direção;
Estabilidade – está última função deve propiciar ao veículo a capacidade de executar
vasta quantidade de manobras, como curvas, frenagens e acelerações, sempre com a
retomada segura do controle quando as mesmas são completadas;
Os componentes elementares de um sistema suspensão veicular são a mola, cuja
função é armazenar energia, e o amortecedor, responsável pela dissipação da energia
absorvida pela mola. Além desses componentes, existem elementos estruturais, que
caracterizam a integração da mola, amortecedor e roda como um mecanismo dando forma e
movimento ao sistema. As diversas possibilidades de integração entre esses componentes
fazem possível identificar uma vasta gama de modelos de suspensão automotiva (SÁBOIA
FILHO; NABARRETE, 2009).
A opção pelo estudo na área de dinâmica multicorpos deve-se ao fato de trata-se de um
tema bastante atual e que no meio acadêmico não se encontra contribuições significativas,
tendo em vista que as técnicas de dinâmica multicorpos para análise de sistemas mecânicos
possuem habilidades para abordar problemas complexos, que envolver vários corpos e grande
quantidade de graus de liberdade.
1.1 OBJETIVO
Este trabalho tem com objetivo analisar uma suspensão automobilística utilizando
componentes elementares diferentes onde estes são representados pela mola e pelo
amortecedor, utilizando o software comercial NX 8.0 o qual desenvolve analises de dinâmica
multicorpos. No trabalho a suspensão foi submetida a uma analise de simulação utilizando o
software, sendo feito dois estudos de caso, na primeira simulação a suspensão estava
composta por um amortecedor e uma mola utilizados em carros off-road, já na segunda
simulação a suspensão recebeu uma mola e um amortecedor utilizados em carros de passeios.

16
1.2 OBJETIVOS ESPECIFICOS
Os objetivos específicos deste trabalho são: Fazer um levantamento bibliográfico sobe
os tipos de suspensões existentes e os seus componentes; estabelecer cenários de simulação; e
analisar os resultados obtidos com a simulação.
2 REVISÃO BIBLIOGRAFICA
Este capítulo tem como objetivo apresentar uma revisão bibliográfica sobre os
aspectos mais relevantes para o desenvolvimento deste trabalho. Na revisão bibliográfica é
apresentado o funcionamento de softwares multicorpos no desenvolvimento de produtos,
também são apresentadas as técnicas de modelagem e os principais tipos de suspensões
automotivas existentes e os seus principais componentes.
2.1 DINÂMICA MULTICORPOS NO DESENVOLVIMENTO DE PRODUTOS
O surgimento de novas ferramentas computacionais nas ultimas décadas tem causado
um grande impacto no processo de desenvolvimento de produtos. Vários softwares baseados
em diversas disciplinas de engenharia estão disponíveis para auxiliar os engenheiros neste
processo. Mas segundo Santos (2007) é importante que estas disciplinas encontrem-se
integrados em um processo de Engenharia Simultânea (do inglês, Simultaneous Engineering),
onde todas as atividades importantes como projeto, análises, testes e fabricação sejam
envolvidas o mais cedo possível no processo de desenvolvimento de um novo produto. Esta
metodologia permite que se tomem decisões corretas antecipadamente e, assim, tanto o tempo
quanto o custo do projeto podem ser reduzidos.
Atualmente as ferramentas computacionais de sistemas multicorpos com suas
possibilidades e vantagens ainda não se encontram completamente exploradas nas indústrias.
Segundo Larsson (2001) através do uso adequado de ferramentas de simulação, o setor
industrial pode:
Experimentar um maior número de alternativas de projeto em um menor intervalo de
tempo.
Simular um maior número de condições às quais o produto estaria sujeito,
possibilitando a descoberta de um possível comportamento não esperado.

17
Melhorar a qualidade do produto por adquirir um maior conhecimento do mesmo e,
conseqüentemente, tomar decisões de forma mais correta.
Diminuir o tempo de lançamento de um produto no mercado através da redução de
iterações de projeto.
Desenvolver produtos orientados por simulações computacionais e não simplesmente
verificados por ela.
Verificar através de testes virtuais que o produto efetivamente cumpre as
especificações de projeto e satisfaz os requisitos dos consumidores.
Otimizar diversos parâmetros do produto antes mesmo da construção do protótipo.
Larsson ressalta, ainda, os benefícios da aplicação da simulação computacional para a
comunidade acadêmica:
Adquirir um maior conhecimento da teoria de sistemas multicorpos.
Identificar os fatores que influenciam a eficiência do processo de simulação de
sistemas multicorpos.
Descobrir a melhor forma de estruturar o processo de simulação de sistemas
multicorpos quando do desenvolvimento de novos produtos.
Segundo Santos (2007) o desenvolvimento de ferramentas CAD (Computer Aided
Design) permite sua utilização em uma grande parte da cadeia de desenvolvimento de um
produto. Uma análise integrada de um produto ainda em fase de projeto já é possível já que
modelos CAD podem ser utilizados na criação de modelos de Elementos Finitos (Finite
Elements, ou FE) para análises estruturais, modelos MBS (Multibody Systems) para análises
dinâmicas e até modelos CFD (Computational Fluid Dynamics) para simulações de
escoamento ou interações fluido-estrutura. Ainda dentro do contexto das ferramentas
computacionais empregadas no desenvolvimento de produtos, é importante citar aquelas
responsáveis por implementar leis de controle aos modelos mencionados, ou seja, os sistemas
CACE (Computer Aided Control Engineering).
Segundo Kortüm; Vaculín (2003) todas estas ferramentas devem interagir, já que
ainda não existe um pacote de engenharia multidisciplinar que aborde todas as disciplinas
necessárias para que se construa um modelo completo. Os autores sugerem a utilização de um
pacote de ferramentas CAD para a construção de um modelo tridimensional que poderia ser
exportado para um software MBS para a geração das equações dinâmicas a partir do

18
formalismo de Newton-Euler, por exemplo. Após um estudo do comportamento dinâmico do
sistema em malha aberta no software MBS, as equações poderiam ser exportadas para um
pacote CACE, onde seriam linearizadas e o sistema seria submetido a uma lei de controle.
Como o controlador deve ser validado no modelo não-linear, o software MBS seria utilizado
na simulação final do sistema controlado. Finalizado o procedimento de simulação do modelo
controlado, poder-se-ia importar a geometria desenvolvida no pacote CAD para desenvolver
animações tridimensionais das simulações, o que facilitaria uma análise do comportamento
dinâmico geral do sistema em questão.
O estágio de desenvolvimento dos pacotes MBS mostra que uma ferramenta
computacional de multicorpos poderia facilmente atuar como uma plataforma integradora
para todas as ferramentas de Computer Aided Engineering (CAE) supracitadas. Pode-se citar
como exemplo, o software SIMPACK, que é tradicionalmente conhecido por atuar como
interface entre os outros pacotes CAE e acaba sendo muito utilizado como solução no
desenvolvimento de projetos mecatrônicos (KORTÜM; VACULÍN, 2003).
Então com a utilização de ferramentas de simulações multicorpos e com a realização
de testes com os produtos virtuais, as empresas podem melhorar seu processo de
desenvolvimento, culminando na elaboração de produtos otimizados e de melhor qualidade e
permitindo que os produtos sejam lançados no mercado em um período de tempo reduzido.
De acordo com Costa Neto (1992) um Sistema Multicorpos é definido como um
sistema mecânico com vários graus de liberdade. Efetivamente, se o sistema mecânico possui
dois ou mais corpos já podem ser considerados como um MBS. Larsson (2001) ainda ressaltar
que o estudo de sistemas multicorpos consiste em uma análise de como um mecanismo se
movimenta através da influência de forças, ou seja, faz parte da chamada Dinâmica Direta. O
estudo do problema inverso, isto é, quais forças são necessárias para fazer um mecanismo
mover-se de uma forma específica é conhecido como um problema de Dinâmica Inversa e é
muito útil no campo da Robótica, onde o controle preciso de movimentos é necessário.
O surgimento da abordagem MBS para a resolução de problemas dinâmicos data do
início do século passado. No entanto, devido à não existência de recursos computacionais na
época, as equações resultantes da teoria aplicada não podiam ser exploradas profundamente.
A abordagem por multicorpos ficou, então, subutilizada por quase meio século, sendo
retomada quando a humanidade iniciou suas tentativas de exploração do espaço. Nesta época,
foi preciso desenvolver equações dinâmicas e suas soluções para satélites e ônibus espaciais
complexos. Simultaneamente, grandes esforços foram realizados para disponibilizar

19
computadores digitais de alta capacidade de processamento, o que propiciou a utilização da
teoria multicorpos na corrida espacial (KORTÜM; VACULÍN, 2003).
Existem diferentes alternativas para a formulação das equações que regem a dinâmica
de um sistema multicorpos. Os formalismos mais conhecidos são o de Newton-Euler, o de
Lagrange e o desenvolvido por Kane, que é o mais recente. O formalismo de Newton-Euler
baseia-se na inclusão de todas as forças de restrição atuando em todos os corpos do sistema,
resultando em um maior número de equações que de incógnitas, o que atrapalha a resolução
do problema. Os formalismos de Lagrange e de Kane eliminam as forças de restrição a partir
da aplicação do Princípio de D’Alembert, o que possibilita a redução do número de equações
em relação ao formalismo de Newton-Euler e uma resolução mais simples e eficiente para o
problema abordado (LARSSON, 2001).
Wallrapp (2004) destaca que as equações dinâmicas de MBS são, em geral, equações
diferenciais não-lineares. Dependendo das coordenadas escolhidas para representar os
movimentos dos corpos, pode-se chegar tanto a um sistema de equações diferenciais
ordinárias (do inglês, Ordinary Differential Equations, ou ODEs) quanto a um conjunto de
equações diferenciais com equações algébricas (do inglês, Differential Algebraic Equations,
ou DAEs). Por isso, o desenvolvimento da teoria de multicorpos sempre esteve intimamente
relacionada à solução de ODEs e DAEs, além do desenvolvimento de métodos numéricos
para resolvê-las.
Wallrapp (2004) ainda ressalta que a grande vantagem da abordagem por multicorpos
encontra-se na possibilidade de trabalhar com juntas não-lineares entre corpos e relações de
forças também não-lineares para descrever o comportamento de corpos em aplicações
específicas como em motores magnéticos, contato entre roda e trilhos ferroviários, modelos
de pneus, caracterização de molas e amortecedores viscosos e etc. Além disso, os poderosos
métodos numéricos desenvolvidos para a resolução das equações dinâmicas de MBS
permitem que engenheiros e cientistas obtenham resultados rápidos tanto no domínio do
tempo quanto no domínio da freqüência.
2.2 TÉCNICAS DE MODELAGEM DE SISTEMAS MULTICORPOS
As técnicas de modelagem de um sistema multicorpos podem ser utilizadas na análise
de projeto de qualquer sistema mecânico que possa ser modelado como um conjunto de
corpos rígidos interconectados por juntas, que tenham influencia de forças, dirigidos por
movimentos determinados e limitados por restrições. Exemplos de sistemas mecânicos,

20
mostrado na Figura 1, que podem ser estudados através destas técnicas que incluem naves
espaciais articuladas, veículos terrestres, mecanismos e máquinas manipuladores, dispositivos
eletromecânicos de alta velocidade, entre outros (KONDO, 1997).
Como foi definido anteriormente, um sistema MBS é composto por um número muito
grande de corpos que apresentam massa ou momentos e produto de inércia, conectados entre
si por juntas sem massa e elementos que transmitem esforços. As juntas têm a função de
restringir determinados graus de liberdade entre os corpos unidos por elas. Elementos de força
podem ser passivos, quando causam apenas forças de reação nos corpos devido ao movimento
relativo entre eles, ou ativos, quando as forças aplicadas aos corpos são resultado da atuação
de um sistema de controle composto por sensores, atuadores e leis de controle.
Segundo Kondo (1997) os conjuntos de corpos rígidos que estão conectados por juntas
são considerado topologicamente equivalente a uma “árvore” (cadeia de corpos com ramos)
que pode ter alguns ramos conectados pra formar laços. Várias juntas de rotação ou de
translação são conectadas a esses corpos. A topologia de um sistema pode ser aberta (árvore)
ou fechada (laço). Além disso, os sistemas podem ter livre movimento, como satélites, ou
preços ao chão, como veículos.
Figura 1- Exemplos de sistemas mecânicos que podem ser modelados pelas técnicas MBS: (a)
mecanismo e máquinas; (b) veículos terrestres; (c) veículos espaciais articulados; (d)
engrenagens; (e) manipuladores; (f) cabos; (g) dispositivos eletromecânicos de alta velocidade
Fonte: Kondo, 1997.

21
De acordo com Kondo (1997) a construção das juntas poder ser baseadas em três
formas primitivas: juntas de rotação unidimensional (juntas de pino), juntas de rotação
bidimensional (juntas de translação) e juntas de rotação tridimensional (juntas esféricas).
Estas três primitivas podem ser utilizadas para construir outros tipos de juntas, tais como
juntas universais (junta de rotação bidimensional com um eixo articulável), junta gimbal
(junta de rotação tridimensional), junta seis graus de liberdade, (juntas livres ou juntas com
seis graus de liberdade utilizando três juntas de translação e uma junta esférica), juntas
cilíndricas (combinação de juntas de translação e de pino), juntas planares (duas juntas de
translação mais uma junta de pino) e juntas soldadas (uma junta com zero grau de liberdade,
muito útil para fechar certos tipos de laços). Na Figura 2 são mostrados os tipos de juntas
encontradas em sistemas mecânicos.
Figura 2- Tipos de juntas: (a) junta de pino; (b) junta de translação; (c) junta esférica; (d) junta
soldada; (e) junta universal; (f) junta gimbal; (g) junta planar; (h) junta cilíndrica; (i) junta de
seis graus de liberdade
Fonte: Kondo, 1997.
Kondo (1997) ainda menciona que as forças e torques que influenciam os sistemas
mecânicos, que são frequentemente chamados de cargas, podem ser de três tipos, como
mostradas na Figura 3.

22
Aplicadas externamente
Forças externas podem ser aplicadas em qualquer posição em qualquer corpo. Do
mesmo modo, torques externos podem ser aplicados em qualquer corpo. Exemplos de cargas
de incluem impulsores, pneus, fricção externa, forças de fluido e molas.
Aplicadas internamente
Forças e torques internos podem ser aplicados em qualquer eixo de junta. Exemplos de
cargas incluem sistemas de motores, acionadores hidráulicos, molas dobráveis e
amortecedores.
Gravitacional
Sistemas mecânicos podem ser influenciados por um campo gravitacional uniforme ou
não-uniforme, no caso de sistemas que atuam no espaço.
Figura 3- Origem das forças que agem sobre os sistemas mecânicos: (a) amortecedores; (b)
molas; (c) gravidade; (d) motores e máquinas; (e) controle de realimentação; (f) controle
direto; (g) pressão; (h) pneus
Fonte: Kondo, 1997.
Os vários tipos de juntas de qualquer sistema mecânico podem restringi os seus
movimentos. Também os movimentos podem ser determinados por fatores internos, como
motores, ou externos como perfil de estrada, movimentos orbitais, entre outros (KONDO,

23
1997). Na Figura 4 são mostrados os fatores que restringem os movimentos do sistema
mecânico.
Figura 4- Restrições nos modelos MBS: (a) engrenagens; (b) distâncias; (c) trilhos; (d)
correias e polias
Fonte: Kondo, 1997.
2.3 METODOLOGIAS PARA ANÁLISE DE SOFTWARES MULTICORPOS
Os softwares de simulação para a análise do comportamento dinâmico de sistemas
mecânicos permitem a formulação das equações de movimento e sua resolução automática,
possuindo diferentes recursos, como geração das equações de movimento na forma numérica
ou simbólica, integradores numéricos, interface gráfica para a entrada e saída de dados,
capacidade de animação gráfica dos resultados, conectividade com sistemas CAD e FE e até
mesmo ferramentas para análise de sinais (SANTOS, 2007).
Os softwares comerciais para simulação de sistemas mecânicos com integração
CAD/CAE começaram a ser desenvolvidos na década de 70. Eles são utilizados na
determinação das equações dinâmicas de sistemas multicorpos e, para isso, fazem uso dos
formalismos de Newton-Euler e de Lagrange. Além de determinar as equações, tais softwares
também são capazes de integrá-las numericamente para condições iniciais previamente
especificadas (LARSSON, 2001).
Segundo Larsson (2001), a metodologia de análise de um sistema de multicorpos
através de software de simulação pode ser dividida em 7 passos principais conforme segue:
a) Formulação do Problema.
b) Definição do Modelo.

24
c) Definição do Modelo Computacional
d) Formulação do Sistema de Equações.
e) Resolução do Sistema de Equações
f) Pós-processamento dos Resultados.
g) Avaliação e conclusão.
2.3.1 Formulação do Problema
De acordo com Larsson (2001), na fase de Formulação do Problema, deve-se definir
os efeitos físicos a serem considerados ou desconsiderados no problema em questão e o
objetivo da análise MBS, sendo que o objetivo da análise pode ser definido a partir das
entidades físicas que se pretende calcular, como, por exemplo, valores de força, torque ou
acelerações aos quais determinados corpos estão sujeitos. De forma mais explícita, é
importante definir tecnicamente o problema a ser resolvido, as limitações do sistema e seus
componentes.
2.3.2 Definição do Modelo
Após o problema ser apontado e os componentes do sistema serem definidos, Larsson
(2001) prossegue à Definição do Modelo. Para facilitar a analise o modelo deve ser o mais
simples possível, mas devendo descrever adequadamente o sistema há ser analisado. Nesta
fase devem-se coletar os dados e parâmetros importantes do sistema. Parâmetros do sistema
incluem, tipicamente, massas, inércias, propriedades de componentes como rigidez e
coeficiente de amortecimento e etc.
2.3.3 Definição do Modelo Computacional
Larsson (2001) enfatiza o fato de que, dependendo do método escolhido para a
resolução das equações, a Definição do Modelo Computacional pode ser feita de várias
maneiras. Sendo um modelo computacional mais detalhado encontra-se diretamente ligado a
um método de resolução menos flexível. O nível de detalhamento de um modelo pode variar
de um simples modelo linear de um grau de liberdade até um modelo sólido complexo e

25
tridimensional com vários graus de liberdade. A partir do momento que se pretende construir
modelos mais complexos é aconselhável acoplar a definição do sistema dinâmico a um pacote
CAD, pela razão de ser mais fácil de definir a geometria, calcular massas, momentos e
produtos de inércia, posições das juntas e etc. Modelos tridimensionais construídos em
sistemas CAD também são bastante úteis na visualização e revisão da geometria em fases
mais avançadas do processo de análise. O método de modelagem de sistemas multicorpos
baseia-se na definição de elementos como corpos rígidos, partículas, rolamentos, juntas,
apoios, molas, amortecedores e atuadores.
2.3.4 Formulação do Sistema de Equações
A Formulação do Sistema de Equações era uma tarefa difícil e trabalhosa há alguns
anos atrás e, hoje em dia para alguns problemas, dependendo da abordagem considerada,
continua sendo. Vários softwares de MBS comerciais, como ADAMS e DADS, por exemplo,
determinam automaticamente as equações dinâmicas do sistema e as resolvem para condições
iniciais dadas. Apesar disso, algumas vezes é necessário que se tenha um maior controle sobre
o processo de geração destas equações (LARSSON, 2001).
2.3.5 Resolução do Sistema de Equações
De acordo Larsson (2001), a Resolução do Sistema de Equações pode ser feita de
varias formas. Nos softwares comerciais para análises dinâmicas, a resolução das equações no
domínio do tempo pode ser realizada automaticamente, com pouca ou mesmo nenhuma
interação por parte do usuário. Apenas a entrada de alguns parâmetros como passo de
integração e tempo de simulação faz-se necessária. A partir do momento que se pretende
trabalhar com as equações de uma forma mais direta, é indicado que se trabalhe com
softwares científicos como o MATLAB, por exemplo. Apesar de as ferramentas de simulação
se mostrarem eficientes para a integração numérica, é preciso que o usuário mantenha-se
atento, pois pode haver erros devidos a instabilidades numéricas. Estes eventos resultam
frequentemente em falhas na simulação. Para minimizar a ocorrência de falhas é importante
que se tenha controle sobre as configurações dos integradores numéricos. Informações sobre
tais configurações encontram-se disponíveis nos manuais de referência do software utilizado e
devem ser sempre levadas em consideração.

26
2.3.6 Pós-processamento
Quando os processos de modelagem e análise computacional são finalizados, segundo
Larsson (2001), dá-se início à etapa mais crucial do processo: o Pós-processamento dos
Resultados. Quando se utiliza um software comercial para a análise dinâmica de um sistema
complexo, o número de resultados a serem analisados pode ser enorme. Para um simples
sistema de multicorpos com algumas partes, existem dezenas de variáveis (deslocamentos,
velocidades, acelerações, forças e torques) que se pode investigar.
Conforme ressalta Larsson (2001), a forma mais simples de análise de um resultado se
dá quando um o valor de uma ou mais variáveis são requeridos em um instante de tempo pré-
definido. Então o resultado é o valor da variável no instante considerado. Para analisar a
resposta do sistema durante um determinado intervalo de tempo, é aconselhável que sejam
plotados gráficos que ilustrem a variação da grandeza em questão no referido período. Esta
prática é muito utilizada na comparação de modelos iguais mais que possuam parâmetros
diferentes. Para a análise de resultados de simulações de sistemas multicorpos o uso de
animações é uma forma bastante comum, já que consiste em uma boa alternativa para a
visualização do comportamento dinâmico do sistema. O uso de animações exige, no entanto, a
disponibilidade de informações sobre a geometria das partes na forma de modelos sólidos, por
exemplo. Podendo ser visualizadas localmente nos programas de MBS comerciais ou, ainda,
exportadas na forma de arquivos de vídeo. Os resultados das simulações podem, também, ser
analisados na forma de tabela em arquivos texto. Então desta forma, os resultados obtidos
podem ser utilizados para alimentar outros processos, como simulações posteriores,
algoritmos de otimização ou de controle.
2.3.7 Avaliação e Conclusão
Segundo Larsson (2001) quando todo processo de formulação do problema, a
modelagem, a analise e interpretação de resultados são completados entra a ultima etapa do
processo que é a avaliação e conclusão de determinado resultados, ou seja, a avaliação do
comportamento do sistema o qual será comparado com a especificação inicial do problema.
Se o problema estiver resolvido, então tem que seguir em frente com o próximo passo para o
desenvolvimento do processo. Se houver o caso do problema não ser resolvido, é importante
descobrir o que errado e talvez repetir o procedimento da analise MBS mais uma vez.

27
2.4 PRINCIPAIS TIPOS DE SISTEMAS DE SUSPENSÃO AUTOMOTIVA
Os sistemas de suspensão surgiram com a necessidade proporcionar conforto e
absorver as irregularidades dos terrenos, na época em que os veículos eram movidos com
tração animal. À medida que os veículos atingiam maiores velocidades no trânsito e com
melhoramento das condições das estradas, as indústrias automobilísticas tiveram que
intensificaram os estudos para a otimização do comportamento das suspensões (MÁXIMO,
2006). Segundo Gillespie (1992), as suas funções principais são:
Permitir a movimentação vertical das rodas ao longo do percurso, isolando o
chassis das imperfeições do solo;
Manter as rodas nos seus ângulos característicos previstos seja estática ou
dinamicamente, executando manobras de mudança de direção e curvas;
Suportar as forças de reação impostas pelos pneus, ou seja, transmitir
aceleração e suportar frenagens longitudinais e forças laterais (curvas);
Suportar os efeitos de rolamento lateral do chassis ou monobloco;
Manter os pneus em contato com o solo, com as menores variações de cargas
possíveis.
Além de permitir a movimentação vertical das rodas, o projeto da geometria da
suspensão dever contribuir também para reduzir as movimentações indesejáveis com relação
ao terreno para que se tenha o conforto dos passageiros durante o deslocamento do automóvel.
Na Figura 5 é mostrado o esquema básico de uma suspensão. A mola principal sustenta a
massa suspensa, e o amortecedor atua dissipando a energia da mola armazenada durante a
movimentação. O pneu também possui uma flexibilidade atuando em série com a mola. Os
amortecimentos atuam em paralelo (MÁXIMO, 2006).

28
Figura 5 – Esquema básico de uma suspensão veicular
Fonte: Máximo, 2006.
Segundo Pereira (2011) os sistemas de suspensão podem pertencer a dois subgrupos,
suspensão dependente e independente. No sistema de suspensão dependente, o movimento
vertical de uma roda implica no movimento vertical da outra roda que se encontra no mesmo
eixo, já o sistema independente, como o nome sugere, o movimento vertical de uma roda é
independente da outra.
O sistema independente ele garante uma maior estabilidade ao veiculo, porém possuir
um maior custo na fabricação do veiculo. Diante disso no mercado são usadas varias
combinações possíveis entre estes tipos de suspensão.
Para o melhoramento da compreensão sobre os tipos de sistemas de suspensão a serem
tratados a seguir, primeiro vamos definir algumas propriedades da geometria de uma
suspensão.
2.4.1 Ângulo Camber
De acordo com Pereira (2011) o ângulo camber, mostrado na Figura 6, é determinado
pela inclinação da parte superior da roda, para dentro ou para fora em relação a um plano
vertical, podendo ser positivo ou negativo dependendo da posição do pneu, ou seja, quando as
rodas estão inclinadas com a extremidade superior apontando para dentro do veiculo o camber
é dito negativo e quando aponta para fora o camber é dito positivo e ainda tem a situação em
que o ângulo de camber é igual a zero, ou seja, quando os pneus fazendo um ângulo de 90°
em relação ao solo. A função do camber é distribuir o peso do veiculo sobre a banda de
rodagem do pneu de maneira uniforme evitando o desgaste irregular dos mesmos.

29
Figura 6 – Cambagem positiva e negativa
Fonte: www.abrapneus.com.br
2.4.2 Ângulo de Convergência
O ângulo de convergência, mostrado na Figura 7, é medido na vista superior entre a
roda e um plano paralelo ao eixo longitudinal do veiculo. Se a parte frontal das rodas é
apontada para dentro do veiculo, diz-se que elas são convergentes e se for aponta para fora
elas são ditas divergentes (REZENDE, 2007).
Esse ângulo tem o objetivo de fazer com que as rodas fiquem paralelas com a
trajetória, quando o veiculo está em movimento, evitando assim uma fricção lateral dos pneus
com o solo, minimizando desgaste dos mesmos (PEREIRA, 2011).
Figura 7 – Convergência positiva e negativa
Fonte: www.abrapneus.com.br
30
2.4.3 Ângulo Caster
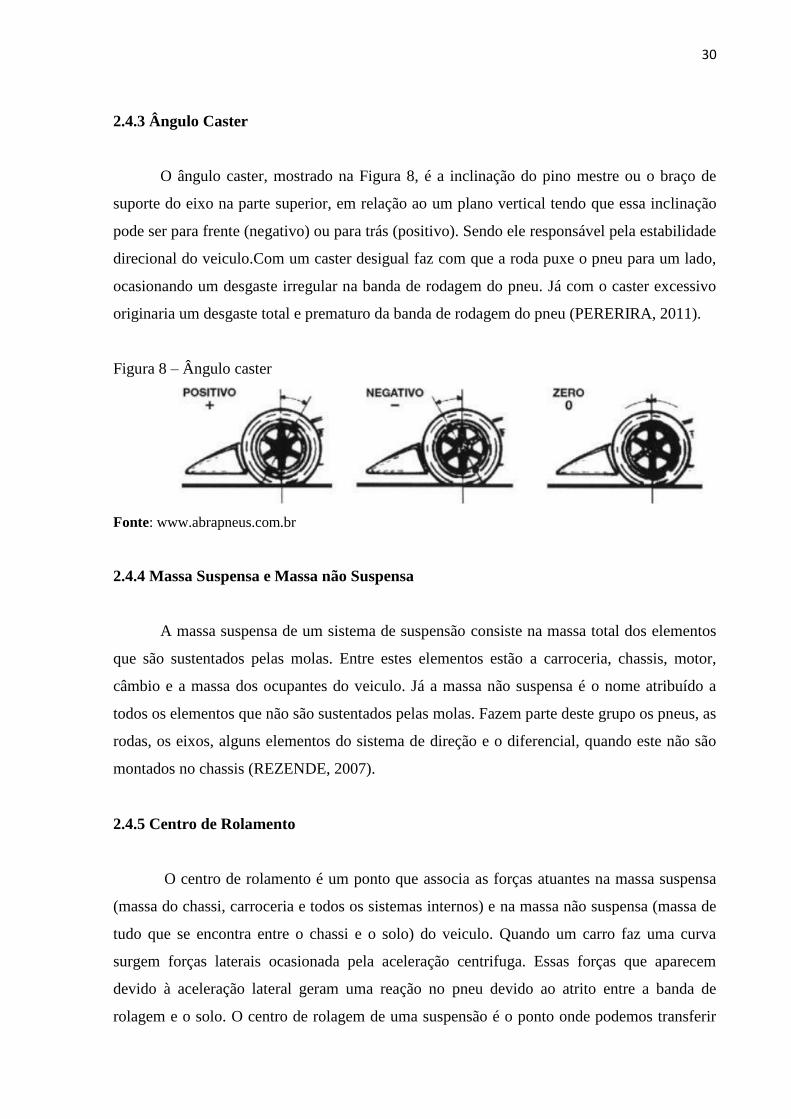
O ângulo caster, mostrado na Figura 8, é a inclinação do pino mestre ou o braço de
suporte do eixo na parte superior, em relação ao um plano vertical tendo que essa inclinação
pode ser para frente (negativo) ou para trás (positivo). Sendo ele responsável pela estabilidade
direcional do veiculo.Com um caster desigual faz com que a roda puxe o pneu para um lado,
ocasionando um desgaste irregular na banda de rodagem do pneu. Já com o caster excessivo
originaria um desgaste total e prematuro da banda de rodagem do pneu (PERERIRA, 2011).
Figura 8 – Ângulo caster
Fonte: www.abrapneus.com.br
2.4.4 Massa Suspensa e Massa não Suspensa
A massa suspensa de um sistema de suspensão consiste na massa total dos elementos
que são sustentados pelas molas. Entre estes elementos estão a carroceria, chassis, motor,
câmbio e a massa dos ocupantes do veiculo. Já a massa não suspensa é o nome atribuído a
todos os elementos que não são sustentados pelas molas. Fazem parte deste grupo os pneus, as
rodas, os eixos, alguns elementos do sistema de direção e o diferencial, quando este não são
montados no chassis (REZENDE, 2007).
2.4.5 Centro de Rolamento
O centro de rolamento é um ponto que associa as forças atuantes na massa suspensa
(massa do chassi, carroceria e todos os sistemas internos) e na massa não suspensa (massa de
tudo que se encontra entre o chassi e o solo) do veiculo. Quando um carro faz uma curva
surgem forças laterais ocasionada pela aceleração centrifuga. Essas forças que aparecem
devido à aceleração lateral geram uma reação no pneu devido ao atrito entre a banda de
rolagem e o solo. O centro de rolagem de uma suspensão é o ponto onde podemos transferir

31
essa força lateral juntamente com o devido momento, dependendo da distância entre o centro
de rolagem e o solo, e como isso obter um sistema equivalente (GILLESPIE, 1992).
Depois de temos vistos alguns dos parâmetros mais importante da geometria de um
sistema de suspensão, então agora passaremos a ver os tipos de suspensões.
2.4.6 Suspensões Dependentes
Para o sistema de suspensão dependente, o movimento de uma roda de um dos lados
do veículo está dependente do movimento da roda do outro lado. Quando uma roda do veículo
atinge um obstáculo, o efeito é transmitido diretamente ao seu parceiro (roda) do outro lado.
Isto tem um efeito prejudicial no passeio e manipulação do veículo. Como principais
representantes desta categoria de sistema de suspensões podem se destacados os seguintes
sistemas: Eixo rígido, Hotchkiss, Four Link e De Dion.
2.4.6.1 Eixo Rígido
O sistema de suspensão conhecido como “eixo rígido”, mostrado na Figura 9, é um
dos mais utilizados atualmente no eixo traseiro dos veículos. De acordo com Pereira (2011)
este tipo de suspensão é basicamente constituído por um eixo rígido ligado às rodas e por
molas helicoidais ou semi-elípticas. O autor ainda ressalta que neste tipo de suspensão as
rodas são dependentes, fazendo com que quando uma tenha movimento ambas às rodas
sofram variação na sua cambagem.
No caso em que o sistema de suspensão dianteira é do tipo eixo rígido isso vai causar
o temido shimmy, que seria uma oscilação de media intensidade das rodas que é transmitida
ao volante.
O sistema de suspensão eixo rígido tem como vantagens o baixo custo, a robustez e a
ausência de manutenção (nunca requer alinhamento do câmber). Gillespie (1992) ainda
ressaltar que o sistema de suspensão eixo rígido têm a vantagem, de que a cambagem das
rodas não será afetadas por oscilações da carroceria. Portanto, é pouco a cambagem das rodas
em curvas. Mas existem algumas desvantagens do sistema eixo rígido como, a dependência
das rodas que estão no mesmo eixo, tendo que a oscilação que uma roda sofre de um lado será
transmitida para a outra roda causando perturbamento no comportamento do veiculo e a
grande massa não suspensa, exigindo elementos de ligações mais robustos, como buchas e

32
bandejas, tornando o conforto bastante limitado e de pouca estabilidade, onde as ondulações
do terreno podem fazer com que os pneus percam o contato com o solo.
De acordo com Pereira (2011) quando o sistema eixo rígido encontra uma
irregularidade do solo, este transfere a energia do choque para as molas. Porém, devido ao seu
alto peso, ele também transfere uma maior quantidade de movimento, ou seja, mais energia
deve ser controlada pelo conjunto molas e amortecedores. Naturalmente, a energia que as
molas não conseguem absorver, é transferida para a carroceria em forma de choque. Devido a
este fato, este tipo de sistema não é muito bom em termos de conforto aos passageiros do
veiculo.
Figura 9 – Sistema de suspensão Eixo Rigido
Fonte: www.movidosagasolina.com.br
2.4.6.2 Hotchkiss
O sistema de suspensão Hotchkiss, mostrada na Figura 10, é um arranjo do sistema
eixo rígido, que utiliza feixe de molas semi-elipticas, sendo amplamente empregado em
veículos de carga. Segundo Rezende (2007) este sistema de suspensão apresenta em sua
configuração mais típica as molas de lâminas semi-elipticas montadas longitudinalmente com
sua extremidades conectadas ao chassis e o eixo montado próximo ao seu centro. Sua
concepção é bastante simples e funcional, uma vez que as próprias molas de lâmina
funcionam como braços de controle da suspensão.

33
Figura 10 – Sistema de suspensão Hotchkiss
Fonte: Gillespie, 1992.
Suas principais desvantagens são o amortecimento de Coulomb provocado pelo atrito
entre as lâminas das molas, a capacidade limitada de transferir torque entre as rodas e o solo, a
grande massa não suspensa e a imprecisão no posicionamento para montagem do eixo. Além
disto, para se obter conforto são necessárias molas macias e isto implica em molas de lâmina
longas. Nesta configuração, as molas podem apresentar problemas de flambagem, (efeito S) o
que impõe sérias restrições de seu uso em veículos de passageiros. Contudo estas
desvantagens não são fatores que contra indiquem o seu uso em veículos pesados
(REZENDE, 2007).
2.4.6.3 Four Link
O sistema de suspensão Four Link começou a ser utilizado com a finalidade de
eliminar as deficiências do sistema Hotchkiss em uma época em que os sistemas de
suspensões dependentes eram presença marcante nos automóveis. Sua configuração consiste
basicamente na substituição das molas de lâmina por molas helicoidais, acrescentando ao
sistema o necessário conjunto de braços de controle (GILLESPIE, 1992). De acordo com
Rezende (2007) uma variação deste sistema apresenta os braços superiores substituídos por
um único braço triangular que exerce a mesma função do sistema original.
A grande vantagem de se utiliza o sistema Four Link em vez do sistema Hotchkiss, é
que no sistema Four Link são utilizadas molas helicoidais para permitir que o sistema
apresente um melhor desempenho sem comprometer a geometria de funcionamento, uma vez

34
que esta é garantida pelo conjunto dos braços de controle. A Figura 11 ilustra um exemplo de
suspensão traseira do tipo Four Link.
Figura 11 – Sistema de suspensão Four Link
Fonte: Gillespie, 1992.
2.4.6.4 De Dion
O sistema de suspensão do tipo De Dion, mostrado na Figura 12, foi projetada para
eliminar os problemas encontrados no sistema de eixo rígido, onde a montagem desse sistema
é bastante parecida com o sistema independente por semi-eixos flutuantes, mas com a
existência de uma barra de ligação entre as duas rodas faz com que este seja um sistema de
suspensão dependente. O sistema apresenta uma diminuição na massa não suspensa, já que
nesse sistema o diferencial, semi-eixos e terminais de direção não estão rigidamente fixados
às rodas.
No sistema Dion as rodas são interconectadas por um tubo telescópio chamado De
Dion que possui uma luva de deslizamento para permitir variações no curso das rodas durante
o movimento da suspensão. O tubo De Dion é responsável por manter as rodas paralelas sob
quaisquer condições, e sempre perpendiculares ao solo, independente da rolagem da
carroceria ou da variação de carga (PEREIRA, 2011).

35
Figura 12 – Sistema de suspensão De Dion
Fonte: Gillespie, 1992.
2.4.7 Suspensões Independentes
Em contraste com o sistema de suspensão dependente, a suspensão independente
permite que cada roda mova-se verticalmente sem afetar a roda oposta. Sendo mais utilizado
no eixo dianteiro de veículos de passageiros, por causa das vantagens de proporcionar um
espaço maior para o motor, por causa de uma facilidade de controle do centro de rolamento
da suspensão, por possuir um grande curso para o movimento das rodas, tem uma grande
rigidez ao rolamento e possuir um valor reduzido da massa não suspensa (GILLESPIE,
1992). Entre os principais sistemas de suspensão desta categoria pode-se destaca os
seguintes: Swing Axles, Trailing Arm, semi Trailing Arm, Multi Link, MacPherson e Short
Long Arm (SLA).
2.4.7.1 Swing Axle
O sistema de suspensão Swing Axle (braços oscilantes), foi inventado por Edmund
Rumpler no inicio do século 20, e este sistema, mostrado na Figura 13, foi muito utilizado
na década de 30 na suspensão traseira de carros europeus, dentre eles o fusca da
Volkswagen. De acordo com Gillespie (1992) o sistema apresenta uma junta
universal montada adjacente ao diferencial, na qual os semi-eixos que conectam as rodas são
montadas para proporcionar o seu movimento de oscilação. Com estas configurações o

36
sistema apresenta todas as vantagens que se pretende obter com um sistema de suspensão
independente. Gillespie (1992) ainda ressaltar que quando uma curva é executada com o
carro em alta velocidade as forças laterais que são desenvolvidas podem provocar um
fenômeno conhecido como “jacking”, que seria a elevação do veiculo no momento da curva.
Este fenômeno traz como conseqüência a perda de aderência em virtude da mudança de
cambagem das rodas. Este problema pode ser resolvido com a utilização de braços
oscilantes mais longos.
Figura 13- Sistema de suspensão Swing Axle
Fonte: Freitas Jr, 2006.
2.4.7.2 Trailing Arm
O sistema de suspensão Trailing Arm, mostrado na Figura 14, também conhecido
como sistema braço de arrasto é um dos mais simples e econômicos projetos de suspensão
dianteira independente usada pela Volkswagen e Porsche por volta da segunda Guerra
Mundial (GILLESPIE, 1992). Este sistema é composto por dois braços de arrasto que são
fixados á carroceria e aos cubos de roda. Geralmente nesse sistema um dos braços é mais
largo que os outros braços de controle empregados em outros sistemas de suspensão, pelo fato
de também dar apoios às molas helicoidais (PEREIRA, 2011).
Segundo Okabe (2003) este tipo de suspensão apresenta o centro de rolagem sempre
posicionado no nível do chão, o que pode ser considerado como uma vantagem, mas inerente
a este tipo de construção também está seu maior defeito: o ângulo camber da roda sempre
acompanhar a inclinação do veículo. Outra desvantagem é a carga excessiva nos rolamentos, e
o momento gerado nos apoios dos braços, o que demanda uma construção bastante robusta,
aumentando o peso, encarecendo o projeto, e reduzindo a eficiência do veículo.

37
Figura 14- Sistema de suspensão Trailing Arm
Fonte: Gillespei, 1992.
2.4.7.3 Semi Trailing Arm
O sistema de suspensão Semi Trailing Arm, mostrado na Figura 15, é uma
combinação das características do sistema Trailing Arm e do sistema Swing Axle. Neste
sistema os braços de controle são montados de forma que seus movimentos descrevam um
arco em relação a eixos, inclinados em torno de 25º em relação a uma linha transversal ao
veiculo (REZENDE, 2007). Este tipo de suspensão apresenta uma inferioridade em termos de
conforto em relação a outros tipos de sistema por causa da quantidade da massa suspensa ter
um valor elevado.
Figura 15- Sistema de suspensão Semi Trailing Arm
Fonte: Pereira, 2011.

38
2.4.7.4 Multi Link
O sistema de suspensão Multi Link, mostrado na Figura 16, é o nome dado a qualquer
suspensão independente que possua um sistema com três ou mais braços de controle. De
acordo com Rezende (2007) a parti desse conceito é possível obter diversos projetos de
suspensão que podem apresentar diferentes configurações de geometria, proporcionando uma
grande flexibilidade de projetos. O sistema é caracterizado por possuir juntas esfericas
conectadas nas extremidades das ligações de modo que elas não experimentam momentos de
flexão. De um modo geral, são necessarios pelo menos quatro braços de ligações para
fornecer um controle longitudinal e lateral das rodas, e reagir aos torques de frenagem
(GILLESPIE, 1992).
Figura 16- Sistema de suspensão Multi Link
Fonte: www.abrazheleno.com.br
2.4.7.5 MacPherson
O sistema de suspensão MacPherson, mostrado na Figura 17, foi desenvolvido pelo
engenheiro americano Earle S. MacPherson da Ford no ano de 1940, sendo introduzido no
mercado pela primeira vez em 1950 nos modelos ingleses da Ford e deste então é o sistema
mais utilizados em praticamente todos os veículos de tração dianteira. Isto se da devido ao seu
baixo custo de montagem e por ser compacto, desse modo oferecendo um maior espaço para
montagem de motores transversais utilizados nos veículos de tração dianteira.

39
O sistema é formado por um amortecedor telescópio, montado geralmente na posição
vertical que, alem de controlar o movimento da suspensão, também trabalha como um braço
de controle para posicionar a roda do veiculo. A extremidade superior do amortecedor é
fixada no chassis por meio de um batente de rolamento e a outra extremidade é fixada no cubo
da roda, sendo ela montada de forma rígida (REZENDE, 2007).
Figura 17- Sistema de suspensão MacPherson
Fonte: Gillespie, 1992.
Segundo Gillespie (1992) o sitema oferece grande vantagem de ocupar pouco espaço,
com isso os motores podem ser motados na posição transversal, sendo amplamente utilizados
em carros com traçao dianteira. Devido à ter suas fixações no chassi ou na carroceria
separados este sistema é bem adaptados a veiculos com carroceria monobloco. O sistema
possui poucas peças e distribui bem as cargas da suspensão. Entre as suas desvantagens
destaca se a altura elevada do conjunto o qual limita a capacidade do designer em diminuir a
altura capô se hover nessecidade.
Segundo Pereira (2011) o sistema destaca-se no mercado pela sua relação custo
beneficio que é considerada muito boa. Altuamente o sistema é utilizado em cerca de 70% das
suspensões dianteiras dos veiculos configurando assim uma boa opção na hora de escolher o
tipo de suspensão a ser usada em um veiculo.
2.4.7.6 Short Long Arm (SLA)

40
O sistema de suspensão Short Long Arm (SLA), também conhecido como dublo-A,
mostrado na Figura 18, é mais utilizado em veículos de competições por ser considerado por
muitos projetista como sendo um sistema ideal de suspensão. Segundo Pereira (2011) isso se
deve ao fato de que esse sistema serve tanto como suspensão traseira ou dianteira, por ser
independente e chegar o mais próximo do possível do ideal em relação ao controle da
cambagem e do ângulo de convergência das rodas. O sistema é constituído por dois braços de
controle em paralelos, onde o braço superior é mais curto do que o braço inferior.
Este sistema possui um excelente desempenho no tocante à estabilidade, ele mantém
as rodas perpendiculares ao solo independentemente do carregamento do veiculo, da atuação
das molas ou da rolagem da carroceria.
Segundo Rezende (2007) este sistema possui um alto nível de desempenho, por conta
de possuir uma geometria onde será gerado um maior ganho de cambagem quando a
suspensão é comprimida, quando comparada aos demais sistemas. Isto acontece porque o
braço superior curto faz com que a parte superior do cubo seja puxada para dentro com maior
intensidade que o braço inferior (mais longo) move a parte inferior também para dentro.
Figura 18 – Sistema de suspensão Short Long Arm (SLA)
Fonte: Gillespie, 1992.
2.5 PRINCIPAIS COMPONENTES ELÁSTICOS E ESTRUTURAIS DE UM SISTEMA DE
SUSPENSÃO
Um sistema de suspensão automotiva é formado por cinco componentes básicos:
sendo dois componentes elásticos (molas e amortecedores) e três componentes estruturais

41
(barra estabilizadora, pinos esféricos e bandeja). A seguir será apresentado uma explicação da
função desses elementos, os tipos existentes e suas características.
2.5.1 Molas
Segundo Rezende (2007) as molas de um sistema de suspensão devem suporta toda a
massa suspensa do veiculo, ou seja, o peso da carroceria, sistema de propulsão e o sistema de
transmissão além do peso dos passageiros. As molas ainda em conjunto com os
amortecedores têm a função de suavizar o movimento vertical devido às irregularidades do
solo, garantindo um maior conforto ao passageiro e uma maior vida ao chassi que recebe os
impactos mais suaves. Elas podem ser molas de compressão, helicoidais ou feixe de molas.
Os materiais usados na construção de molas automotivas podem ser de origem sólida,
líquida ou gasosa. O aço é o principal material empregado na fabricação de molas. As molas
helicoidais são submetidas aos esforços de torção, enquanto que nas do tipo lâminas, os
esforços são de flexão. Atualmente as molas helicoidais são as mais utilizadas em função do
bom desempenho, custo, domínio do processo, facilidade de fixação e pouco espaço utilizado
no grupo da suspensão (DIXON, 1996).
A constante de rigidez de uma mola é uma das suas propriedades que melhor lhe
caracteriza e que muitas vezes é confundida com a sua capacidade de carga, mas a constaste
de rigidez é definida como a quantidade de carga suportada pela mola para comprimi-la de
uma unidade de comprimento. A constante é geralmente expressa em lb/in ou em N/m. de
forma diferente, a carga da mola determina o quanto de força é necessário para comprimi-la
de uma determinada extensão (REZENDE, 2007).
2.5.1.1 Molas Semi-Elipticas
As molas semi-elipticas, mostrada na Figura 19, são molas de laminas disposta
longitudinalmente, sendo amplamente utilizadas em veículos de carga que usam suspensão do
tipo eixo rígido (REZENDE, 2007). Segundo Freitas Jr (2006) as molas semi-elipticas têm
como vantagens: simplicidade de construção, robustez e baixo custo. O autor ainda ressaltar
que a alta rigidez, devida a alta histerese deste tipo de mola quando submetida a vibrações de
pequenas amplitudes e altas frequências, faz com que este tipo de mola tenha uma alta
transmissibilidade neste modo de operação, com consequênte deterioração do conforto.

42
Segundo Gillespie (1992) uma das características deste tipo de mola é a diminuição da
rigidez sob a carga lateral que tem como, consequência, menor estabilidade lateral, quando
são fabricadas mais longas para atingir menor rigidez vertical.
Figura 19- Feixe de molas Semi-Elipticas
Fonte: Freitas Jr, 2006.
Segundo Freitas Jr (2006) outro tipo de mola semi-elipitica é a parabólica, mostrada na
Figura 20, que apresenta como vantagem um menor atrito interno, por causa do número
reduzido de laminas. Ela ainda apresenta uma menor rigidez vertical sem comprometer a
rigidez lateral.
Figura 20- Feixe de molas Semi-Elipticas do tipo parabólica
Fonte: Freitas Jr, 2006.
2.5.1.2 Molas Helicoidais
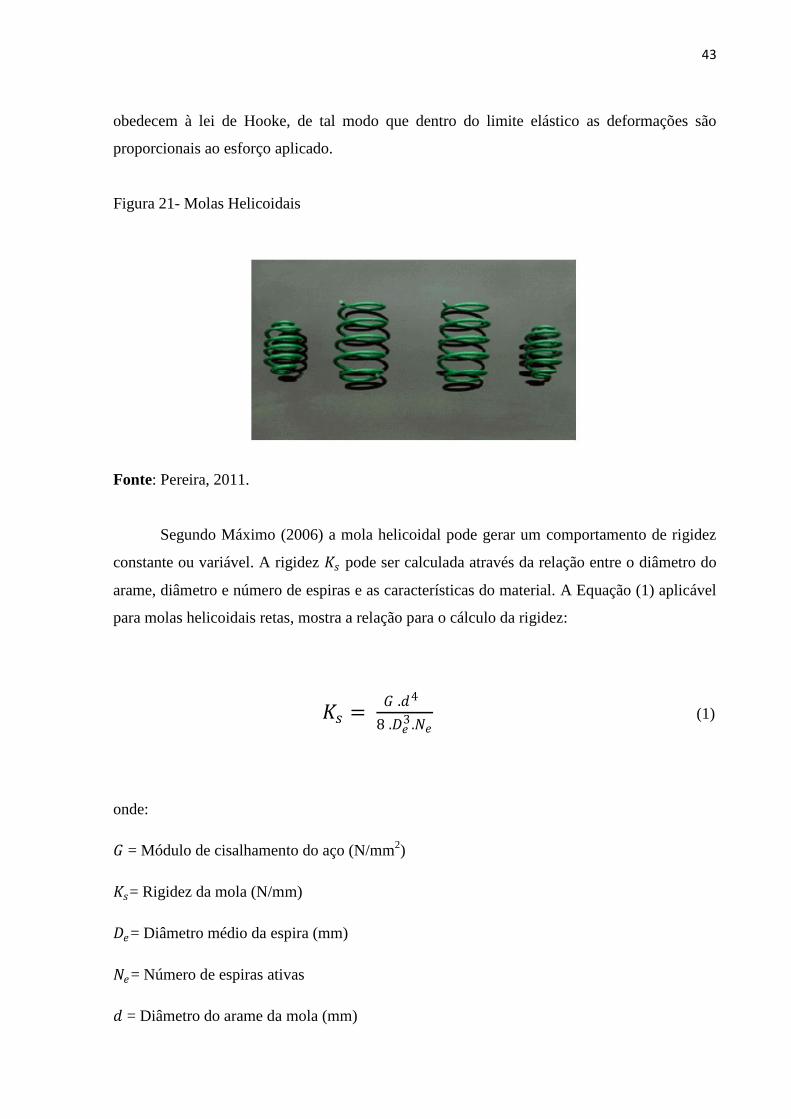
As molas helicoidais, mostrada na Figura 21, são fabricadas a partir de um arame
sendo ele enrolando na forma helicoidal, este tipo de mola é atualmente a mais utilizada no
setor automobilístico. Segundo Rezende (2007) as molas helicoidais têm como vantagens, em
relação às molas semi-elipticas: o peso reduzido, a necessidade de pequenos espaços para
montagem e a facilidade de manutenção. Além disto, a liberdade de projeto aumenta
significativamente uma vez que a mola deixa de exercer a função de transmitir força entre as
rodas e a carroceria do veiculo. As molas helicoidais normalmente trabalham à compressão e
43
obedecem à lei de Hooke, de tal modo que dentro do limite elástico as deformações são
proporcionais ao esforço aplicado.
Figura 21- Molas Helicoidais
Fonte: Pereira, 2011.
Segundo Máximo (2006) a mola helicoidal pode gerar um comportamento de rigidez
constante ou variável. A rigidez 𝐾𝑠 pode ser calculada através da relação entre o diâmetro do
arame, diâmetro e número de espiras e as características do material. A Equação (1) aplicável
para molas helicoidais retas, mostra a relação para o cálculo da rigidez:
𝐾𝑠 = 𝐺 .𝑑4
8 .𝐷𝑒3 .𝑁𝑒
(1)
onde:
𝐺 = Módulo de cisalhamento do aço (N/mm2)
𝐾𝑠= Rigidez da mola (N/mm)
𝐷𝑒= Diâmetro médio da espira (mm)
𝑁𝑒= Número de espiras ativas
𝑑 = Diâmetro do arame da mola (mm)

44
Uma vez definidas as características da mola, pode-se calcular as deflexões sofridas
em função da carga aplicada. A Equação (2) mostra esta relação.
𝑥𝑚 = 8.𝐹.𝐷𝑒
3 .𝑁𝑒
𝐺 .𝑑4 (2)
onde:
𝑥𝑚 = Deflexão sofrida pela mola (mm)
𝐹 = Magnitude da força (N)
A escolha da rigidez das molas pode mudar em função da missão do veiculo, sendo
basicamente menor quando a mola é utilizada em veiculo de passeio e maior quando se exigir
do veiculo um bom desempenho em manobras, como por exemplo, em veículos off-road.
De acordo com Freitas Jr (2006) a mola helicoidal possuir um histerese desprezível,
sendo que o amortecimento é realizado totalmente pelo amortecedor. Quando o foco é
conforto é este tipo de mola que se dever ser utilizado.
O tipo mais comum e de menor custo de molas helicoidais é a cilíndrica linear, sendo
que os veículos que utilizam este tipo de mola em seu sistema de suspensão têm a sua altura
modificada de acordo com o carregamento e segundo Freitas Jr (2006), a variação de
frequência de ressonância de um sistema de suspensão equipado com este tipo de mola,
também diminui com o carregamento do veiculo.
2.5.1.3 Molas Pneumáticas
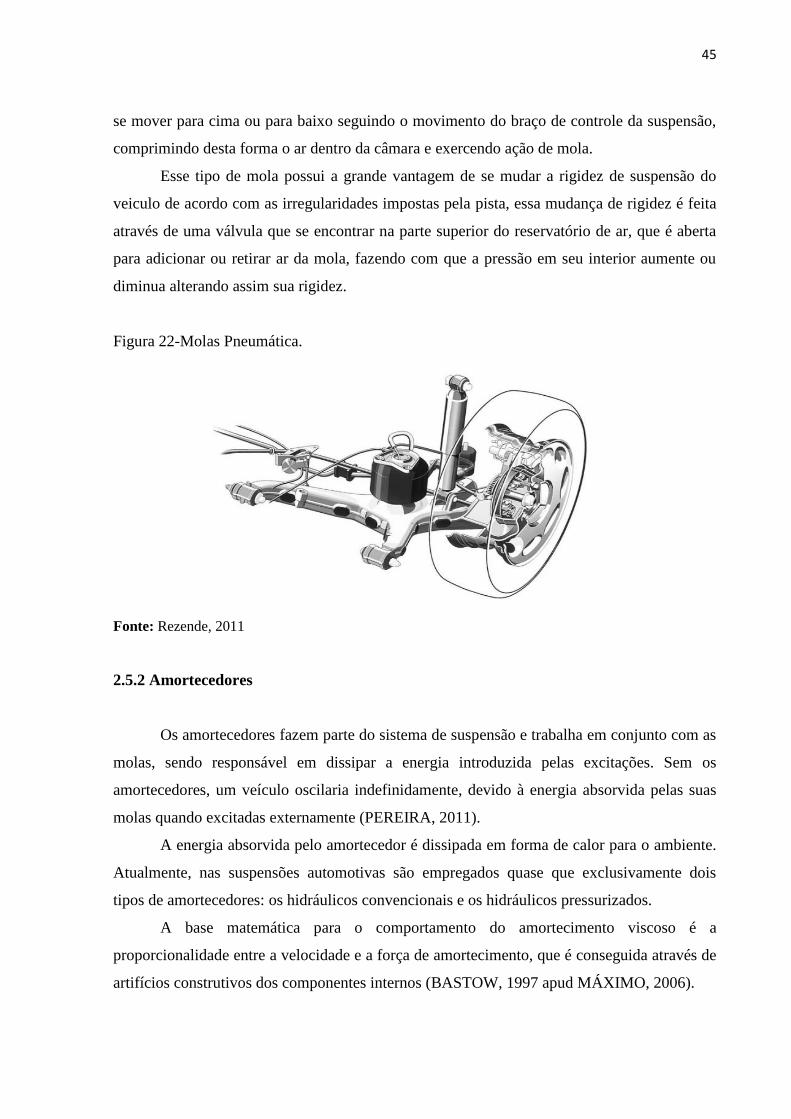
As molas pneumáticas, mostrada na Figura 22, ela é do tipo que oferece melhores
características dinâmicas sob variadas condições de carga, por conta disso é atualmente mais
usada em veículos de carga (FREITAS JR, 2006). De acordo com Rezende (2007) a mola
pneumática consiste em um cilindro de borracha onde em seu interior contem ar ou gás que é
comprimido por um pistão montado no braço de controle inferior da suspensão. O pistão pode
45
se mover para cima ou para baixo seguindo o movimento do braço de controle da suspensão,
comprimindo desta forma o ar dentro da câmara e exercendo ação de mola.
Esse tipo de mola possui a grande vantagem de se mudar a rigidez de suspensão do
veiculo de acordo com as irregularidades impostas pela pista, essa mudança de rigidez é feita
através de uma válvula que se encontrar na parte superior do reservatório de ar, que é aberta
para adicionar ou retirar ar da mola, fazendo com que a pressão em seu interior aumente ou
diminua alterando assim sua rigidez.
Figura 22-Molas Pneumática.
Fonte: Rezende, 2011
2.5.2 Amortecedores
Os amortecedores fazem parte do sistema de suspensão e trabalha em conjunto com as
molas, sendo responsável em dissipar a energia introduzida pelas excitações. Sem os
amortecedores, um veículo oscilaria indefinidamente, devido à energia absorvida pelas suas
molas quando excitadas externamente (PEREIRA, 2011).
A energia absorvida pelo amortecedor é dissipada em forma de calor para o ambiente.
Atualmente, nas suspensões automotivas são empregados quase que exclusivamente dois
tipos de amortecedores: os hidráulicos convencionais e os hidráulicos pressurizados.
A base matemática para o comportamento do amortecimento viscoso é a
proporcionalidade entre a velocidade e a força de amortecimento, que é conseguida através de
artifícios construtivos dos componentes internos (BASTOW, 1997 apud MÁXIMO, 2006).

46
Normalmente a razão de amortecimento médio para um veículos de passeio estão entre
0,2 e 0,4. Para carros esportivos ou de competições off-road estão na faixa de 0,4 a 1,0. A
relação básica entre as cargas de compressão e extensão é de 30/70, podendo ainda variar de
acordo com o modelo e o perfil de utilização (GILLESPIE, 1992).
Segundo Rezende (2007) para que os amortecedores trabalhem com 100% de
eficiência eles devem ser montados em uma posição perpendicular em relação à direção da
pista, pois quando montados com inclinação, apenas um componente da força do amortecedor
trabalha no controle dos movimentos da suspensão. Sendo assim procura-se montar os
amortecedores com inclinação pequena. Para ângulos de inclinação acima de 30º, os
amortecedores trabalham de forma ineficiente sobrecarregando os componentes da suspensão.
2.5.2.1 Amortecedor Hidráulico
De acordo com Pereira (2011) os amortecedores hidráulicos, mostrado na Figura 23,
são dispositivos que transformam energia cinética em energia térmica. Quando a haste do
amortecedor se movimenta ela pressuriza o fluido interno, gerando uma força que faz com
que o fluido circule pelos orifícios de restrição causando o seu rápido aquecimento, que em
contato com o cilindro o aquecer e em seguida o cilindro dissipa esse calor para a atmosfera.
Figura 23- Amortecedor Hidráulico
Fonte: Pereira, 2011.
2.5.2.2 Amortecedor Pressurizado
Os amortecedores pressurizados, mostrado na Figura 24, seguem a mesma linha de
funcionamento dos amortecedores hidráulicos, porém possui gás nitrogênio junto do óleo
lubrificante. Esse gás tem a finalidade de diminuir a possibilidade de formação de bolhas no

47
fluido lubrificante quando este é submetido a intensas atividades de compressão e distensão
(REZENDE, 2007).
Segundo Pereira (2011) o amortecedor pressurizado tem a vantagem de ter uma maior
estabilidade e dirigibilidade, porém possuir a desvantagem de ser mais caro que os
amortecedores hidráulicos. São muitos utilizados em vans e carros esportivos.
Figura 24- Amortecedor Pressurizado
Fonte: Pereira, 2011.
2.5.3 Barra Estabilizadora
As barras estabilizadoras ou barras anti-balanço, mostrada na Figura 25, têm como
objetivo evitar que chassi do carro gire em uma curva fechada diminuindo assim o risco de
capotamento, elas também são responsáveis pelo aumento da rigidez torcional do veiculo,
diminuindo assim os esforços sofridos pelo chassi quando este é submetido a terrenos com
muitas irregularidades (PEREIRA, 2011).
Segundo Pereira (2011) a barra estabilizadora pode deixa a suspensão mais macia e,
em consequência, fornecer maior conforto sem comprometer a estabilidade do veiculo nas
curvas. Sem a barra estabilizadora, haveria uma grande pressão nas molas e o sistema de
suspensão sofreria maior esforço. Atualmente a maioria dos veículos utiliza a barra
estabilizadora em seu sistema de suspensão.

48
Figura 25- Barra Estabilizadora
Fonte: Pereira, 2011.
2.5.4 Pinos Esféricos
Os pinos esféricos, mostrado na Figura 26, são pinos articulados que são responsáveis
por prender o cubo da roda à suspensão, fazendo a ligação entres as partes suspensa (chassis e
carrocerias) e as partes não suspensas (cubo da roda, manga de eixo e telescópio). Eles
recebem esforços muitos grandes durante a aceleração, a frenagem e curvas, e, em alguns
casos, também suportam o peso do veiculo (PEREIRA, 2011).
Figura 26- Pinos Esféricos
Fonte: Pereira, 2011.
2.5.5 Bandeja de Suspensão
A bandeja de suspensão, mostrada na Figura 27, permite que a roda tenha uma
articulação na suspensão. Ela apresenta um formato triangular e articula-se em juntas de
metal-borracha chamadas de silent-block, ainda tem a função de controlar o posicionamento

49
das molas e amortecedores. A construção da bandeja de suspensão é formada por uma
estrutura forjada, estampada ou fundida (PEREIRA, 2011).
Figura 27- Bandeja de Suspensão
Fonte: Pereira, 2011.
3 METODOLOGIA
Este trabalho como foi mencionado anteriormente tem como objetivo fazer uma
análise de um modelo de suspensão automotiva, já existente, gerado pelo software NX da
empresa Siemens PLM Software com a utilização de diferentes elementos elásticos (molas e
amortecedores). No modelo de suspensão será analisados dois tipos diferentes de
amortecedores e dois tipos diferentes de mola. Nesta análise o sistema de suspensão será
submetido a vibrações, ocasionadas por uma plataforma de teste automobilístico que também
foi gerado no software NX. Com estes testes, em seguida será traçado e analisados gráficos
que foram gerados pelos dois casos.
3.1 O SOFTWARE NX
De acordo com a Siemens Plm Software (2013) o NX, também conhecido como
Unigraphics NX, é um software que possui uma solução avançada de pacotes
CAD/CAM/CAE para o desenvolvimento de produtos. Abrange toda a gama de
funcionalidades no desenvolvimento de produtos, incluindo:
syncronous technology que permite o uso continuo das abordagens de
modelamento mais produtivas no mesmo ambiente, incluindo o modelamento
explicito de sólidos e superfícies, bem como o modelamento paramétrico e
livre de histórico;

50
Automação baseada em conhecimento que permite aproveitar o
conhecimento do produto e do processo adquirido por sua empresa em
experiências próprias, bem como de praticas recomendadas do setor;
Inovação de processo que permite otimizar e integrar o trabalho diário das
equipes de planejamento, projeto conceitual, engenharia de simulação e
manufatura;
Simulação de ciclo de vida que permite otimizar os processos de simulação,
validação e otimização, além de incorporar a simulação de desempenho no seu
processo de desenvolvimento de produto com mais antecedência e frequência.
O software NX integra princípios baseados no conhecimento de design industrial,
modelagem geométrica, análise avançada, simulação gráfica e engenharia simultânea. O
software tem potentes capacidades de modelagem híbrida, integrando modelagem baseada em
recursos de constrangimento e explícita modelagem geométrica. Além de modelar peças de
geometria normalizadas, ela permite que o utilizador desenhe formas livres complexas
(SIEMENS PLM SOFTWARE, 2013).
O software NX trabalha a partir da construção de mecanismos através da criação de
links no arquivo de simulação a partir da geometria existente e restringindo-se essa geometria
com articulações e controladores de movimento. Depois de definir os objetos de movimento
para o mecanismo o solver irá executar uma simulação cinemática ou estática-dinâmica. O
resultado de análise disponível incluirá verificações de interferências, gráficos, animações, a
produção do filme MPEG e planilha de dados das juntas em instantes diferentes da simulação.
(SIEMENS PLM SOFTWARE, 2013).
3.2 MODELO DA SUSPENSÃO GERADA NO NX
O modelo da suspensão é inspirado no sistema de suspensão Short Long Arm (SLA)
ou Duplo-A utilizado nos carros da marca Chevroret da GM. O modelo do sistema de
suspensão gerado no ambiente NX pode ser mostrado na Figura 28 e é formado pelos
seguintes corpos: braço oscilante inferior, braço de direção, amortecedor estrutural, molas,
braço oscilante superior e manga de eixo.

51
Figura 28 – Modelo da suspensão gerada no NX.
Fonte: Próprio autor (2013).
Para estabelecer as conexões entres os corpos rígidos do sistema de suspensão foram
utilizadas 2 juntas translação com gerador de movimento, 2 juntas de revolução, 4 juntas
esféricas e 2 juntas universal. Na Figura 29 são apresentas as juntas do sistema de suspensão,
que estão numeradas e são descritas na tabela 1.
Figura 29 – Juntas do modelo da suspensão.
Fonte: Próprio autor (2013).

52
Quadro 1 – Descrição das juntas do sistema de suspensão.
1 Junta de translação com gerador de movimento.
2 Junta de revolução.
3 Junta esférica.
4 Junta universal.
Fonte: Próprio autor (2013).
3.3 MODELO DA PLATAFORMA DE TESTE
Com o intuito de se efetuar simulações de deslocamentos verticais, para quer se possa
analisar o sistema de suspensão foi gerado no software NX, mostrada na Figura 30, uma
plataforma de teste automobilístico.
Figura 30 – Plataforma de teste gerada no NX.
Fonte: Próprio autor (2013).
Para quer se fosse efetuado um movimento vertical na plataforma foi preciso utilizar
uma junta de translação com um gerador de movimento, que pode ser vista na Figura 31.

53
Figura 31 – junta utilizada na plataforma de teste.
Fonte: Próprio autor (2013).
4 SIMULAÇÃO E ANÁLISE DOS RESULTADOS
Neste capitulo serão descritas as simulações realizadas pelo software NX no modelo
de suspensão que foi descrita no capitulo anterior e as análises dos resultados das simulações.
Nesta análise a suspensão fará deslocamentos verticais, que serão gerados pela plataforma de
testes, o conjunto suspensão e plataforma de teste podem ser visto na Figura 32. Serão
realizadas duas simulações no modelo de suspensão, onde na primeira simulação a suspensão
será composta por elementos elásticos (amortecedor e mola) usados em carros de passeio e na
segunda simulação a suspensão será composta por elementos elásticos usados em carros de
competições off-road.

54
Figura 32 – Conjunto suspensão e plataforma de teste.
Fonte: Próprio autor (2013).
4.1 ANÁLISE DO MODELO DE SUSPENSÃO UTILIZANDO ELEMENTOS ELÁSTICOS
USADOS EM CARROS DE PASSEIO
Nesta primeira análise a suspensão será submetida a uma variação de curso de 35mm
para cima e 35mm para baixo. No sistema de suspensão será utilizada uma mola com
constante de rigidez 𝐾=36942,49N/m e um coeficiente de amortecimento 𝐶=1734,44N/m/s2.
Estes dados são retirados de um veiculo comercial de passeio.
No Gráfico 1, é mostrado o deslocamento vertical da suspensão em função do tempo.
Com este gráfico pode-se notar que o deslocamento máximo que a suspensão pode alcançar, é
de aproximadamente 32mm para cima ou para baixo.

55
Gráfico 1 – Deslocamento vertical da suspensão utilizando elementos elásticos usados em
carros de passeios.
Fonte: Próprio autor (2013).
No Gráfico 2, é mostrada a força que age sobre a suspensão, ocasionada pela
plataforma de teste. Nota-se que a suspensão atinge uma força de compressão máximo no
instante 1,9 s, que é o mesmo instante em que a suspensão atingir seu máximo pico de
deslocamento vertical, conforme mostra o Gráfico 1.

56
Grafico 2 – Força da suspensão utilizando elementos elásticos de usados em carros de passeio.
Fonte: Próprio autor (2013).
4.2 ANÁLISE DO MODELO DE SUSPENSÃO UTILIZANDO ELEMENTOS ELÁSTICOS
USADOS EM CARROS OFF-ROAD
Nesta segunda etapa o modelo de suspensão será submetido ao mesmo procedimento
de análise, o qual foi mostrado anteriormente. Mas agora o sistema passara ter um novo
conjunto de elementos elásticos. No modelo será utilizada uma mola com constante de rigidez
𝐾=38025 N/m e um coeficiente de amortecimento 𝐶 = 3850 N/m/s2. Estes dados são retirados
de um veiculo de competição off-road.
No Gráfico 3, é mostrado o deslocamento vertical da suspensão em função do tempo.
Pode se notar que no Gráfico 3 o valor de deslocamento máximo da suspensão, que é de
aproximadamente 27mm para cima ou para baixo nota-se que o valor de pico diminui em
relação ao gráfico 1, isso devido a trocar elementos elásticos utilizados na suspensão.
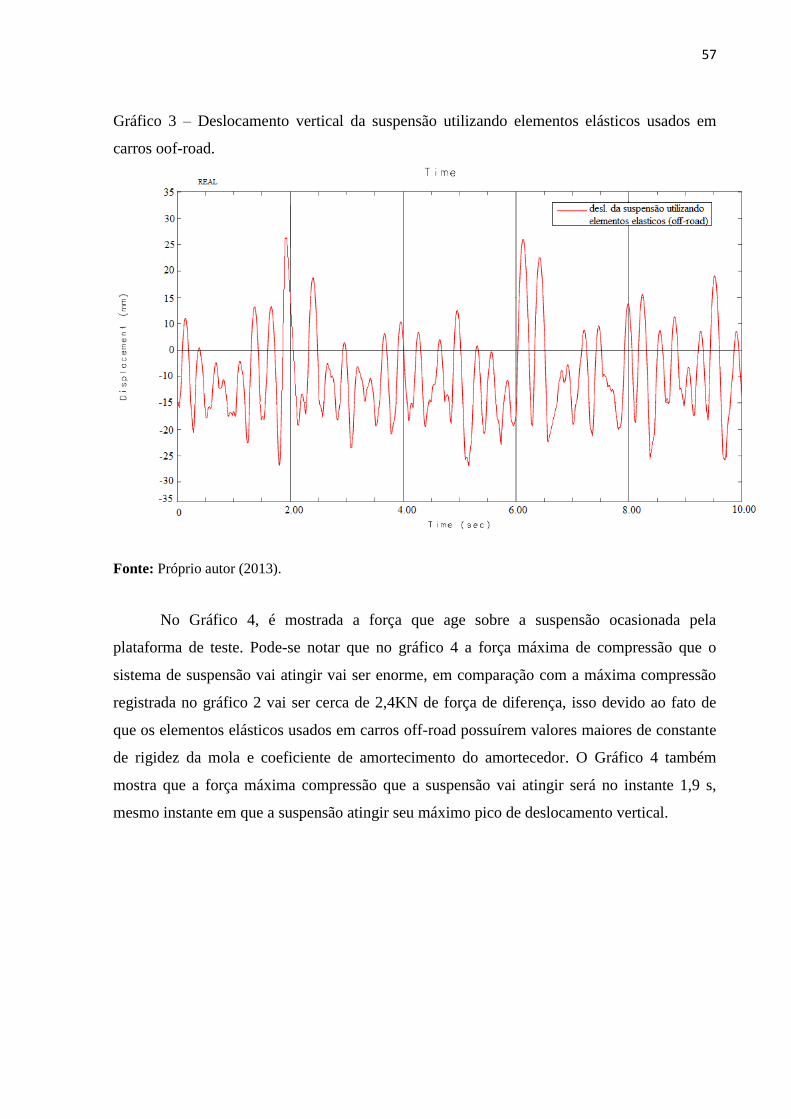
57
Gráfico 3 – Deslocamento vertical da suspensão utilizando elementos elásticos usados em
carros oof-road.
Fonte: Próprio autor (2013).
No Gráfico 4, é mostrada a força que age sobre a suspensão ocasionada pela
plataforma de teste. Pode-se notar que no gráfico 4 a força máxima de compressão que o
sistema de suspensão vai atingir vai ser enorme, em comparação com a máxima compressão
registrada no gráfico 2 vai ser cerca de 2,4KN de força de diferença, isso devido ao fato de
que os elementos elásticos usados em carros off-road possuírem valores maiores de constante
de rigidez da mola e coeficiente de amortecimento do amortecedor. O Gráfico 4 também
mostra que a força máxima compressão que a suspensão vai atingir será no instante 1,9 s,
mesmo instante em que a suspensão atingir seu máximo pico de deslocamento vertical.
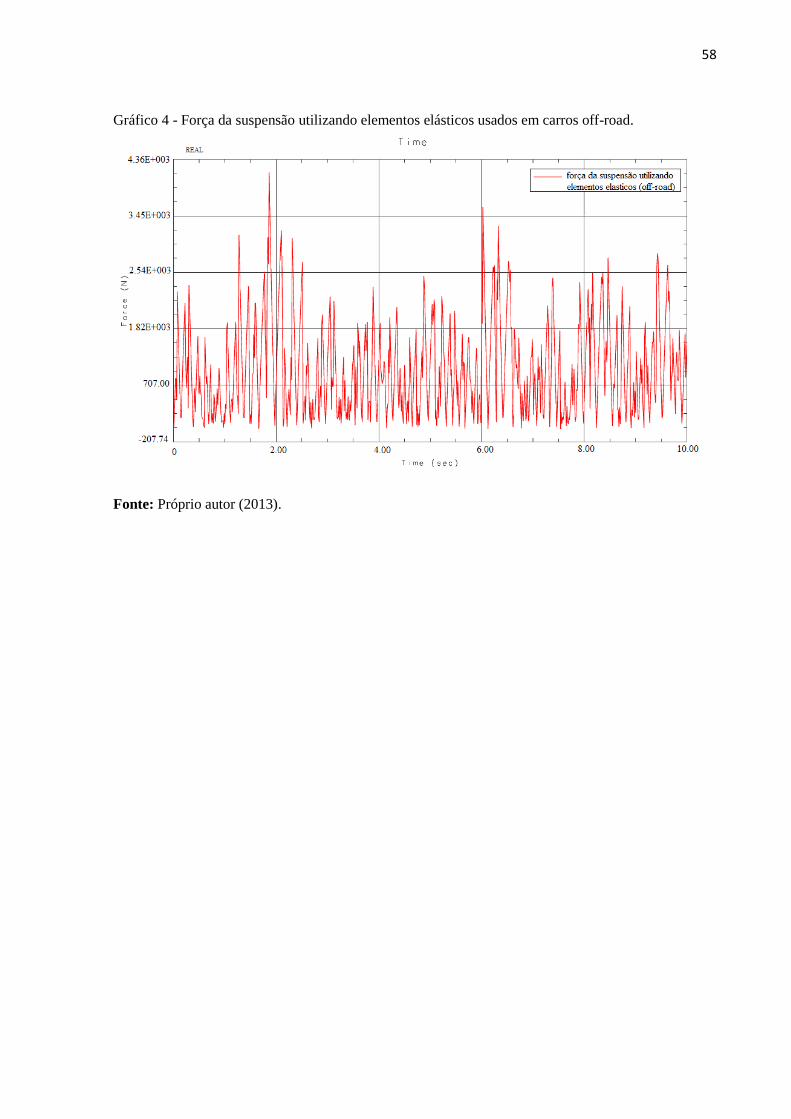
58
Gráfico 4 - Força da suspensão utilizando elementos elásticos usados em carros off-road.
Fonte: Próprio autor (2013).

59
5 CONCLUSÃO
Como pode ser visto no trabalho os softwares MBS são indiscutivelmente muito úteis
no processo de desenvolvimento de projetos em engenharia, podendo ser utilizados em
diversas fases do desenvolvimento. A engenharia mecânica utiliza muito esses softwares no
processo de desenvolvimento, desde geração de desenhos de projetos até a simulação de
possíveis produtos mecânicos.
O presente trabalho teve por objetivo analisar uma suspensão automobilista com a
utilização desses softwares MBS. Foram criados cenários de simulação no software o qual
gerou gráficos que foram analisados e discutidos. Todos os fundamentos teóricos para o
desenvolvimento desse trabalho foram apresentados e discutidos.
Em relação a análise que foi feita no sistema de suspensão podemos concluir quando
se procurar um movimento suave na suspensão dever se usar molas com valores baixos de
constante de rigidez e coeficiente de amortecimento, já para se obter uma maior resistência na
suspensão dever se aumenta os valores de constante de rigidez das molas e os coeficientes de
amortecimento dos amortecedores.
Para a realização dessas analises foi usado o software NX que cumpriu de forma eficaz
o seu papel. No software utilizado foi possível apresentar os modelos tridimensionais dos
elementos que fazem parte do sistema de suspensão, o software também realizou simulações
para a obtenção de gráficos para que a análise fosse discutida.
Com isso encerra-se este trabalho tendo tido atingido o objetivo de analisar uma
suspensão automotiva usando ferramentas computacionais.
Como possibilidade de desenvolvimento ou mesmo aprofundamento deste tema, pode-
se desenvolver um trabalho, partindo para o modelamento mais detalhado da suspensão
acoplada ao sistema de direção do veiculo, para que possam ser feitas simulações, utilizando
os softwares multicorpos, e destas simulações analisar o comportamento do sistema de
suspensão no momento em que o veículo faz manobras ou curvas.

60
REFERÊNCIAS
COSTA NETO, A. Application of Multybody System (MBS) Techniques to Automotive
Vehicle Chassis – Simulation for Motion Control Studies. 1992. 213p. Ph.D. Thesis,
University of Warwick, Conventry, UK, v. 1.
DIXON, John C.. Tires Suspension and Handling. 2. ed. Warrendale: Society of
Automotive Engineers, 1996. 565 p.
FREITAS JR, Luiz Mauro P. Estudo da Dinâmica Vertical de uma Suspensão Veicular do
Tipo MacPherson. 2006. 130 f. Dissertação (Mestrado) - Curso de Engenharia Mecânica,
Escola de Engenharia de São Carlos, São Carlos, 2006.
GILLESPIE, THOMAS D. Fundamentals of Vehicle Dynamics. Warrendale: Society of
Automotive Engineers, Inc, 1992. 470p.
KONDO, Rogério Toshiaki. Animação de Simulações de Sistemas Mecânicos
multicorpos. 1997. 113 f. Dissertação (Mestrado) - Curso de Ciências de Computação e
Matemática Computacional, Universidade de São Paulo, Uberlândia, 1997.
KORTÜM, W.; VACULÍN, O. Is Multibody Simulation Software Suitable for
Mechatronic Systems? Vehicle System Dynamics Supplement, London, n. 40, p. 1 – 16,
2003.
LARSSON, T. Multibody Dynamic Simulation in Product Development. Division of
Computer Aided Design – Department of Mechanical Engineering – Lulea University of
Technology, Lulea, 2001.
MÁXIMO, Luiz Fernando B.. Estudo do Comportamento Dinâmico de um Veículo de
Passageiros em Manobras de Handling. 2006. 177 f. Dissertação (Mestrado) - Pontifícia
Universidade Católica De Minas Gerais, Belo Horizonte, 2006.
OKABE, Eduardo Paiva. Metodologia de Projeto para o Desenvolvimento de Suspensão
Veicular. 2003. 154 f. Dissertação (Mestrado) - Curso de Engenharia Mecânica, Universidade
Estadual de Campinas, Campinas, 2003.
PEREIRA, Mário Augusto S. Sistema de Suspensão do Veiculo Elétrico para Coletiva
Seletiva. 2011. 68 f. Relatorio (Graduação) - Curso de Engenharia Mecânica, Universidade de
Brasilia, Brasilia, 2011.
REZENDE, Jean Carlos Campos. Projeto e Implementação de um Modelo de Suspensão
Automotiva em Bancada de Laboratório. 2007. 171 f. Dissertação (Mestrado) - Curso de
Engenharia Mecânica, Universidade Federal de Uberlândia, Uberlândia, 2007.
SABÓIA FILHO, Fábio Antônio Teixeira; NABARRETE, Airton. Análise Dinâmica do
Sistema de Suspensão Swing Axle para veículos off-road. In: ENCONTRO DE INICIAÇÃO

61
CIENTÍFICA E PÓS-GRADUAÇÃO DO ITA, 9., 2009, São José Dos Campos. Anais...
. São José Dos Campos: ITA, 2009. p. 1 - 8.
SANTOS, Vinícius Lopes dos. Estudo da Dinâmica Vertical de um Veiculo Através da
Teoria de Sistemas Multicorpos. 2007. 132 f. Trabalho de Formatura (Graduação) - Curso
de Engenharia Mecânica, Escola Politécnica da Universidade de São Paulo, São Paulo, 2007.
SIEMENS PLM SOFTWARE. Siemens PLM. Disponível em:
<http://www.plm.automation.siemens.com/pt_br/>. Acesso em: 21 jul. 2013.
WALLRAPP, O. Review of Past Developments in Multibody System Dynamics at DLR –
From FADYNA to SIMPACK. Vehicle System Dynamics, London, vol. 41, n. 5, p. 339 –
348, 2004.